
Miniature Spy Planes: The Next Generation of Flying Robots
STEPHEN J. MORRIS
MLB Company
Palo Alto, California
INTRODUCTION
Affordable airborne access to information has been on the wish list of the military, businesses, and individuals for a long time, but nearly 100 years after the Wright brothers’ flight at Kitty Hawk this dream has not yet come true. Anyone who wants to check out events on the ground at a particular moment still needs a full-size airplane or helicopter, a pilot’s license, and a nearby airfield. The barriers to obtaining information from airborne platforms are the technological difficulties of controlling and navigating the aircraft and the remote sensing of information. In the last three decades, advancements in digital computers, satellite position sensing, solid-state inertial sensing, and video imaging have made possible the first generation of small, affordable, robotic aircraft that require only moderate operator skills and can provide useful image data. These vehicles typically have a wingspan of less than 6 feet and weigh less than 10 pounds, so they pose minimal safety hazards to the public. Because they fly at low altitudes (less than 500 feet), they operate below the airspace where full-size aircraft operate and are, therefore, allowed to fly freely within the framework of local city ordinances.
A typical miniature unmanned air vehicle (mini-UAV) has a quiet engine and is difficult to spot in the air. It can cruise the skies day or night in a wide range of weather conditions gathering information for law enforcement, traffic monitoring, air-pollution control, farming, fire spotting, power line inspection, search and rescue, and weather monitoring. In the near future, individuals will be able to log on to the Web site of a mini-UAV service and request image data for a specific region. This request will prompt teams of mini-UAVs to fly to the appropriate location, gather the requested data, and send the data to the customer
over the Internet for a reasonable price. The mini-UAVs doing the work will be all but invisible.
In this paper, I will describe some successful mini-UAV designs, the technical challenges of miniaturizing UAVs, and future applications.
BACKGROUND
The military has used UAVs to gather intelligence since World War II. In the Vietnam War, drones built by Teledyne Ryan flew regular reconnaissance missions gathering valuable photographic data under autonomous flight control. The Israeli airforce pioneered the use of smaller, low-cost drones for reconnaissance and decoy missions. In all of these examples, UAVs were flown in the same airspace as man-carrying aircraft, which was necessary for military reasons.
The Federal Aviation Administration (FAA) has not yet decided how UAVs will be incorporated into civilian airspace, which has kept their commercial use in this country to a minimum. Mini-UAVs offer a solution to this problem because they can operate safely at altitudes below the operating altitude of full-size air traffic and, because of their size, speed, and weight, they pose little threat to the public.
Until the introduction of the Global Positioning System (GPS) in the 1980s, UAVs required expensive inertial guidance systems that were often adapted from man-carrying aircraft or long-range missiles. Thus, UAVs were large, costly aircraft only the military could operate. Most of the current military UAVs are still large and costly, primarily because they are designed for long-range, high-altitude missions and because they carry heavy mil-spec sensor payloads.
MINI-UAVS
In the last few years, mini-UAVs have become effective surveillance systems. A few examples of notable mini-UAVs are described below.
Pointer
In the late 1980s, AeroVironment, Inc., of Simi Valley, California, developed a small, low-cost, remotely piloted drone for the Marines that could be carried in two backpacks and could be flown with moderate pilot skills. With a 9-foot wingspan, Pointer was the first true mini-UAV system to be commercially produced (Figure 1). Pointer carries a forward-looking color camera and is powered by an electric motor that provides up to 90 minutes of operation with present lithium battery technology.
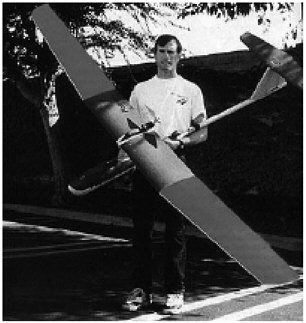
FIGURE 1 Pointer UAV by AeroVironment. Source: AeroVironment, Inc., Simi Valley, California.
Microair Vehicles
In 1997 the Defense Advanced Research Projects Agency funded the development of reconnaissance microaircraft (i.e., the largest dimension of 6 inches). Lockheed-Sanders and AeroVironment have studied these microair vehicles (or MAVs), and each has developed a successful flying example. The typical MAV mission requires a modest duration of 30 minutes, a range of 1 mile, and operation in winds up to 20 mph. AeroVironment’s Black Widow (Figure 2) has a 6-inch wingspan, uses an electric motor for propulsion, and weighs 80 grams (Grasmeyer and Keennon, 2001). The Lockheed-Sanders MicroStar MAV has a 12-inch wingspan, uses electric propulsion, and is capable of autonomous flight with GPS navigation. Both MAVs carry color cameras and use lithium batteries for propulsion. Black Widow and MicroStar have demonstrated the possibility of significant miniaturization in reconnaissance aircraft, as long as mission duration and range remain short.
Aerosonde
In 1998, a 30-pound aircraft with a 9-foot wingspan flew 2,500 miles in 27 hours across the Atlantic Ocean under autonomous control, mimicking the flight
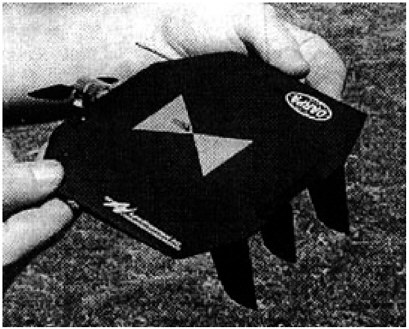
FIGURE 2 Black Widow by AeroVironment. Source: AeroVironment, Inc., Simi Valley, California.
made by Charles Lindbergh 51 years earlier. Aerosonde, by Aerosonde Ltd., demonstrated that the flight performance of smaller size UAVs need not be restricted (Figure 3). Using a modified model-aircraft engine, composite model-airplane wings, and GPS navigation, Aerosonde’s transatlantic flight required only 1.5 gallons of gasoline.
Bat
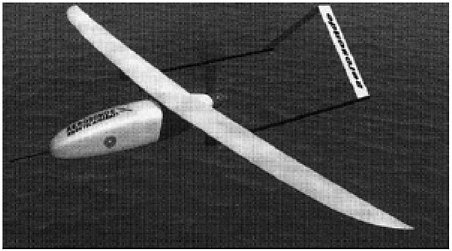
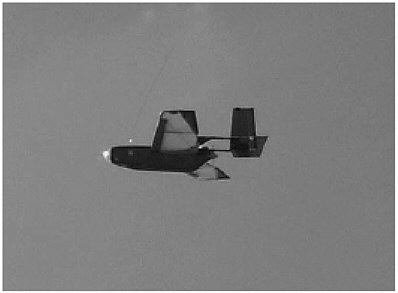
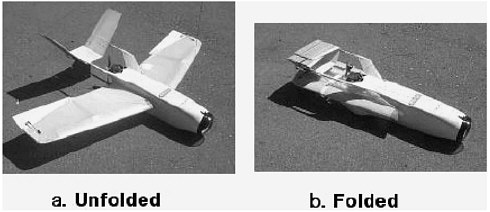
The low-cost Bat by MLB (Figures 4 and 5a,b) is designed to operate in populated areas, can be easily transported by a single person, and delivers high-quality image data. Bat has a 5-foot wingspan, weighs 9 pounds, and folds up for transport. The entire aircraft and ground station fits easily into the trunk of a car and can be readied for flight in 10 minutes.
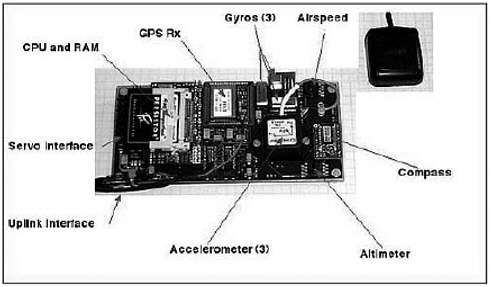
Using a miniature flight-control system (Figure 6), Bat can fly autonomously between specified points and can take off and land unaided. The aircraft can operate for one hour and can transmit video and flight data over a 2-mile radius. The sensor package is a 3-axis gimbal mount with two video cameras, each with a different field of view lens that can be switched in flight for closer views of desired areas. The gimballed camera is inertially stabilized using the flight-
control computer, and the UAV operator can aim the camera remotely. In the event of a structural failure or a failure of the flight-control system, a separate system automatically deploys a parachute to slow the aircraft to a safe descent speed.
A ground station based on a PC laptop makes the Bat mini-UAV easy to operate. Figure 7 shows a screen snapshot of the display, which includes Bat’s track on a moving map, altitude, speed, system status, and other flight data parameters. The geographic location of the image being viewed by the camera is also shown and recorded so that all images are georeferenced. The operator specifies flight plans by clicking on the map and inserting new way-points. Once the aircraft is launched, it follows the course defined by the way-points at the speed and altitude specified for each leg of the course.
Bat has been used in research projects on wildlife habitat to provide image mosaics of wetland areas and to deploy a miniature sensor network that transported data back to a remote ground station via Bat. Figure 8 shows Bat dropping sensors along a roadway during a military demonstration at 29 Palms Marine Base in California. The sensors, developed by Professor Kris Pister at the University of California at Berkeley (Kahn et al., 1999), are designed to form data networks automatically, detect moving vehicles, and relay the data back to the UAV.
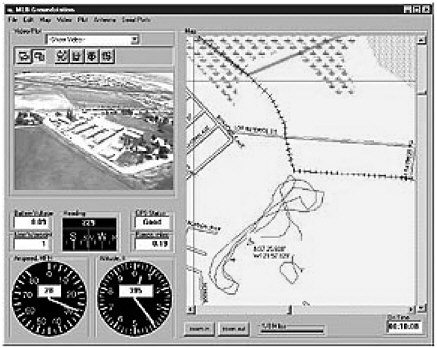
FIGURE 7 Ground station screen image. Source: Stephen Morris, MLB Company, Palo Alto, California.
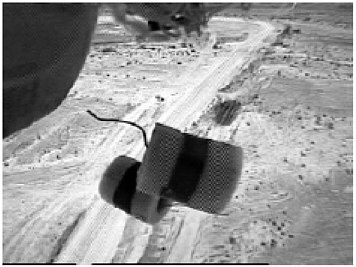
FIGURE 8 Bat deploying microsensors along a roadway. Source: Stephen Morris, MLB Company, Palo Alto, California.
SCALING ISSUES AND TECHNICAL CHALLENGES
How small can a UAV be? Nature provides some readily observable answers to this question. Small birds are capable of sensing images and can migrate thousands of miles. Even insects can operate in a radius of several miles. Logically, surveillance aircraft could be just as small if engineers could design systems as adaptable and capable as the systems found in nature. The major technical challenges facing engineers in scaling UAVs to smaller sizes are discussed below.
Aerodynamics
As wings become smaller, the nature of the airflow over them changes, because the interaction between the wings and air particles scales with size, speed, and air viscosity. The Reynolds number, a dimensionless parameter that characterizes the flow regime over bodies, involves the ratio of inertial to viscous forces in a fluid flow. As the Reynolds number decreases, the viscous effect becomes dominant, and it becomes difficult to generate lift while maintaining low drag. Many birds, insects, and model aircraft operate at a low Reynolds number (approximately 200,000 to 20,000) and still perform adequately for their purposes. At a very low Reynolds number, the best strategy for generating lift with low-energy input shifts from smooth, shaped airfoils to rougher wing surfaces and unsteady movement through the fluid. The wing motion of small
insects changes rapidly to generate unsteady vortices in the viscous flow, producing lift with minimal energy.
Initially, researchers believed that Reynolds number effects would produce the greatest challenge to miniaturizing UAVs, but aircraft like Black Widow and Aerosonde have demonstrated that a high level of performance can be obtained with proper aerodynamic design. The impact of increased drag, indicated by a low Reynolds number, on MAV performance was quantified by Morris (1997), who showed that it was much less important than propulsion efficiency and lift-generating capability. For mini-UAVs, a lift to drag ratio of 20:1 could be achieved, if necessary, for long-range, long-duration flights.
Propulsion
As the weight of UAVs decreases to less than 20 pounds, the options for efficient propulsion systems are also reduced dramatically. Modified model-aircraft engines that use methanol or gasoline as fuel are popular on mini-UAVs, but they are often inefficient and unreliable. Nevertheless, because fossil fuels have a high-energy density, these engines are still useful for most mini-UAV missions. However, efficient internal combustion engines of less than one horsepower have not been fully researched, and much progress could be made in this area. Electric power has been used successfully for short-range, short-duration aircraft, such as MAVs, but has been limited by the low-energy density of present battery technologies. Batteries with the highest energy densities (e.g., lithium) often have limited power density, which has further complicated the design of electric-powered UAVs.
Flight Control and Sensing
Birds and insects have evolved complex brains and musculature and can process a great deal of sensory input. Living creatures that fly have distributed actuator, sensor, and computation capabilities, which make them very agile, efficient, and adaptable. The agility of mini-UAVs is often limited because extremely small, lightweight, high-quality sensors and actuators have not yet been developed. Scaling to smaller sizes compounds the problem of flight control because the dynamics of the aircraft increase in frequency as size decreases, in the same way a small pendulum has a higher natural frequency than a large one. Therefore, mini-UAVs require higher bandwidth actuators than their larger counterparts. Recent advances in microelectromechanical systems (MEMS) technology have produced microscopic sensors (e.g., gyroscopes, accelerometers, pressure transducers, etc.) that are highly suitable for mini-UAVs. If advances in MEMS continue, an entire flight avionics system will soon be available on a single chip. This would greatly reduce the weight and volume of flight avionics, which tend to be a higher percentage of the total as UAV size shrinks. MEMS
devices could also provide the bandwidth and accuracy necessary for flight-control sensing and computing, which would make mini-UAV flight much more agile.
Telemetry
The power required to transmit data varies with the square of the distance between the transmitter and the receiver, independent of the size of the aircraft sending the data. Therefore, one of the greatest scaling challenges for mini-UAVs is sending data over great distances without requiring excessive power (and weight). Possible solutions to this problem include high-gain antennas, reduced data rates, and burst-transmission communication schemes. In general, telemetry range is reduced as UAV size decreases unless the vehicle is linked to a communication network. In a recent demonstration, Bat was used to “truck” data from a deployed sensor network back to a remote location. This eliminated the need for either system to have a long-range telemetry link and mimicked the solution, often seen in nature, of storing the data and retransmitting at close range.
Data Quality
Most mini-UAVs carry a fixed camera as the primary image sensor. Flight tests have shown that image quality is degraded by aircraft motion caused by maneuvering or wind gusts. Imaging could be improved with an inertially stabilized servocontrolled gimbal camera mount that adjusts for aircraft motion and allows the operator to position the field of view. Small gimbal camera systems are being developed for the latest mini-UAVs.
Data quality is closely linked to the postprocessing of the image data collected by UAVs. Raw video images must be adjusted for camera alignment, combined into larger image maps (mosaics), and possibly have features identified and extracted. The data may then be combined with other databases (e.g., satellite data, digital maps, etc.) to maximize their value. Currently, little commercial software has been developed to process the vast amount of video data that would be generated by fleets of mini-UAVs. The full potential of UAV fleets will only be realized when the data-fusion bottleneck is eliminated.
Complete UAV System
UAV size is further influenced by the ground-based systems needed to operate them. As an example, consider a UAV so small that it cannot transmit good-quality data over great distances. For acceptable telemetry range, a large directional antenna would be required. Thus, the complete system might be bigger than for a larger UAV carrying a more powerful data transmitter. When
transportation and cost are factored in, system size can be more important than UAV size. Realizing the smallest system size will require that the UAV and the ground-support equipment be considered simultaneously in the design process.
FUTURE APPLICATIONS
An example of a near-term commercial application for mini-UAVs is as an aid to precision agriculture. The amount of water, insecticide, and fertilizer used in agriculture is highly regulated and must be dispensed efficiently. High-value crops, such as strawberries and vineyards, require almost daily monitoring at specific points in the growing season to ensure a high quality and high yield per acre. Mini-UAVs could deliver the higher quality data more efficiently and at lower cost than satellites and light aircraft. Image data taken in the near-infrared and color spectra could be processed to make vegetation growth-index maps that show where fertilizer, water, or insecticide is needed. In the future, automated farming operations could use the data gathered by mini-UAVs to direct unmanned robotic tractors and harvesters for optimal crop management.
Current satellite imagery is limited to 10-meter pixel resolution, and images are affected by cloud cover and satellite trajectories. Because mini-UAVs fly at low altitudes, they could supplement satellite image databases with high-resolution imagery collected during periods of cloud cover or whenever desired.
Mini-UAVs will surely evolve into increasingly capable (and almost unnoticeable) surveillance platforms that will be economical to operate and safe to use over populated areas. Teams of mini-UAVs will be able to communicate with each other and organize themselves for optimal data gathering. In the not too distant future, mini-UAVs will become an essential part of information gathering systems that can supply near-real-time data to customers through the Internet. These transportable, inexpensive aircraft will also be used in remote locations that are currently too costly to monitor.
REFERENCES
Grasmeyer, J.M., and M.T. Keennon. 2001. Development of the Black Widow Micro Air Vehicle. AIAA Paper No. 2001-0127.
Kahn, J.M., R.H. Katz, and K.S.J. Pister. 1999. Next century challenges: Mobile networking for smart dust. Pp. 271-278 in Proceedings of the Fifth Annual ACM/IEEE International Conference on Mobile Computing and Networking. New York, N.Y.: ACM Press.
Morris, S. 1997. Design and flight test results for micro-sized fixed-wing and VTOL aircraft. Presented at the First International Conference for Emerging Technologies of Micro Air Vehicles, Atlanta, Ga., February 19–20, 1997. Available online at <http://www.spyplanes.com/Background/MAV_97/Mavpaper.htm>.
Shephard Press. 2000. Shephard’s Unmanned Vehicle Systems Handbook 2001. Bucks, England: The Shephard Press.











