
Wireless Integrated Network Sensors (WINS): The Web Gets Physical
GREGORY J. POTTIE
Electrical Engineering Department
University of California, Los Angeles
INTRODUCTION
Wireless integrated network sensors (WINS) provide distributed network and Internet access to sensors, controls, and processors embedded in equipment, facilities, and the environment. WINS combine sensor technology, signal processing, computation, and wireless networking capability in integrated systems. With advances in integrated circuit technology, sensors, radios, and processors can now be constructed at low cost and with low power consumption, enabling mass production of sophisticated compact systems that can link the physical world to networks (Asada et al., 1998; Bult et al., 1996; Dong et al., 1997; Lin et al., 1998). These systems can be local or global and will have many applications, including medicine, security, factory automation, environmental monitoring, and condition-based maintenance. Because of their compactness and low cost, WINS can be embedded and distributed at a small fraction of the cost of conventional wire-line sensor and actuator systems. Designers of systems with hundreds, or even thousands, of sensors will face many challenges.
Centralized methods of sensor networking make impractical demands on cable installations and network bandwidth. The burden on communication system components, networks, and human resources can be drastically reduced if raw data are processed at the source and the decisions conveyed. The same holds true for systems with relatively thin communications pipes between a source and the end network or systems with large numbers of devices. The physical world generates an unlimited quantity of data that can be observed, monitored, and controlled, but wireless telecommunications infrastructure are finite. Thus, even as mobile broadband services become available, processing of
raw data at the source and careful control of communications access will be necessary.
In this paper, I present two scenarios illustrating different aspects of the design trade-offs. The first example is an autonomous network of sensors used to monitor events in the physical world for the benefit of a remote user connected via the Web. The second scenario explores how sensor information from an automobile could be used. A general architecture for both is shown in Figure 1. The figures does not show in detail how services can actually be supported by Internet-connected devices, but two clusters of nodes, connected through separate gateways to the Internet, can supply some services. The nodes are assumed to be addressable either through an Internet protocol address or an attribute (e.g., location, type, etc.). Unlike pure networking elements, the nodes contain a combination of sensors and/or actuators. In other words, they interact with the physical world. The gateway may be a sensor node similar to other nodes in the cluster, or it may be entirely different, performing, for example, extra signal processing and communications tasks and having no sensors. In the cluster in the top left portion of Figure 1, nodes are connected by a multihop network, with redundant pathways to the gateway. In the bottom cluster, nodes may be connected to the gateway through multihop wireless networks or through other means, such as a wired local area network (LAN). The nodes in different clusters may be all one type or they may vary within or among clusters. In a remote monitoring situation, part of the target region may have no infrastructure; thus, the multihop network must be capable of self-organization. Other parts of the region may already have assets in place that are accessible through a preexisting LAN. There is no requirement that these assets be either small or wired. The
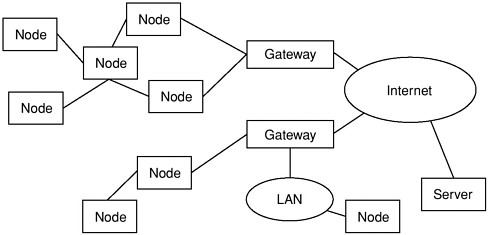
FIGURE 1 WINS network architecture.
point is to design a system that makes use of all available devices to provide the desired service.
In the next section, I briefly describe some design heuristics. This is followed by a discussion of current research on the deployment of large networks in areas without infrastructure support. The next section focuses on how sensor networks in vehicles can be linked with the Internet.
DESIGN HEURISTICS
Pottie and Kaiser (2000) described some of the fundamental physical constraints on the cost of sensing, detection, communication, and signal processing. They identified five basic design constraints:
-
For reliable detection in many situations, sensors must be in close proximity to a physical event (e.g., physical obstructions to cameras); thus large numbers of sensors may be needed. The type of information obtained with large numbers of sensors is qualitatively different from the information obtained with remote arrays.
-
The cost of sensors, radios, and signal processing will come down as the cost of integrated circuit technology comes down. The cost of batteries and other energy sources, however, will come down much more slowly.
-
The cost per bit for communications energy is often many orders of magnitude higher than for the energy required to make decisions at the source. Whereas processing cost is limited to first order only by current technology, the efficiency of communications has fundamental limits.
-
Networks must be self-organizing to be economical.
-
Scaling to larger numbers while maintaining physical responsiveness requires a hierarchy with distributed operation at lower levels and increasingly centralized control at higher levels.
Note that a hierarchy does not necessarily imply a need for heterogeneous devices. Consider, for example, a human organization. The processing abilities are roughly equal at all levels, but in progressing up the chain, different information is processed at different levels of abstraction and aggregation. Commands moving down the chain also differ in the level of abstraction, from policies to work directives, that require different levels of interpretation. This flexibility enables individuals at the lower levels to deal with local changes in the work situation much faster than if a central controller had to be consulted for each action; at the same time, global goals continue to be pursued. With machines of course, we can provide highly differentiated abilities to devices at different levels of the hierarchy. For example, a backbone long-range high-speed communications pipe can greatly reduce latency compared to multihop links. Thus, even though a logical rather than physical hierarchy is arguably much more important
to scalability, the designer of large-scale systems must not be seduced by the siren song of homogeneity and should consider both. In any case, homogeneity is impractical in long-lived systems composed of integrated circuit components. For systems that use the Internet, the architecture must accommodate successive generations of more powerful components.
REMOTE MONITORING
I will now consider a more concrete example of a system that identifies particular classes of targets passing through a remote region. The targets could be military vehicles, species of animals, pollutants, seismic events on Mars, or, on a smaller scale, enzyme levels in the bloodstream. In any case, let’s assume there is no local power grid or wired communications infrastructure, but that there are long-range communications for getting information to and from a remote user. In laying out a network like the one depicted in Figure 1, both energy and communications bandwidth can be critical constraints. If the network must scale in the number of elements, much of the signal processing will have to be performed locally. For example, in studying the behavior of animals in the wild, a dense network of acoustic sensors might be used. The nodes would contain templates for identifying the species emitting the call. Nodes that made a tentative identification could then alert their immediate neighbors so the location of the animal could be roughly determined by triangulation. Infrared and seismic sensors might also be used in the initial identification and location processes. Other nodes would then be activated to take a picture of the target location so a positive identification could be made. This hierarchy of signal processing and communications would be orders of magnitude more efficient in terms and energy and bandwidth than sending images of the entire region to the gateway. In addition, with the interaction of different types of nodes, most of the monitoring would be automated; humans would be brought into the loop only for the difficult final recognition of the visual pattern of preselected images. Upon positive identification, the audio and infrared files corresponding to the image would be added to a database, which could subsequently be mined to produce better identification templates. Note that with long-range communications links (via the gateway), the user could make the full use of web-accessible utilities. Thus the end user would not have to be present in the remote location, and databases, computing resources, and the like could all be brought to bear on interpreting the (processed) data.
Experimental apparatus for initial exploration of an application domain and the apparatus that will actually be needed for large-scale deployment may differ. Because networked sensors have hitherto been very expensive, relatively little array data are available for most identification purposes, and sensors have typically been placed much farther from potential targets than they will be with WINS. This means, paradoxically, that initially fairly powerful nodes will have
to be constructed to conduct large-scale experiments to collect raw data and suitable identification algorithms developed from the resulting database. In experimenting with different networking algorithms, it is desirable, from the point of view of software development, to provide an initial platform with considerable flexibility. The DARPA SensIT Program has produced development platforms to support this kind of experimentation (Kumar, 2001). Other researchers have focused on specializing functions and miniaturizing components to demonstrate that large networks of small nodes can be produced. Sensoria Corporation’s WINS NG 2.0, for example, nodes include ports for four sensors, a realtime digital signal processor, memory, a main processor running Linux, a battery and port for external power, the global positioning system (GPS), Ethernet, an RS-232 port, and two radios for convenient synthesis of multihop networks. Software interfaces have been created to enable programmers to control remotely a large number of physical attributes of nodes and to download new applications remotely. Thus, diverse users can produce algorithms for networking, target identification, and distributed database management. On another track, researchers at the University of California-Berkeley are engaged in producing very small nodes with limited sensing and communications abilities to demonstrate that sensing, signal processing, and communications can be combined in a miniature package.
AUTOMOTIVE APPLICATIONS
All automobiles produced recently include many processors and sensors, as well as a variety of networks for sensing, control, and entertainment systems. For example, hundreds of sensor parameters are accessible through the on-board diagnostic port. However, there are no connections between these networks and external communications systems, such as cellular phones. The Automotive Multimedia Interface Collaboration (AMI-C) has been working on ways to connect these networks and provide standardized buses in automobiles so a wide range of consumer electronics can be installed. This would create an automotive intranet that could then be conveniently accessed via the Internet (AMI-C, 2001). Ports on the bus could include any of a number of radios, so wireless devices in the vehicle could become part of the intranet, or short-range high-speed communications could be possible between a vehicle and a residence or service station.
A key component of the architecture envisioned in the AMI-C standard is a gateway that separates proprietary and safety-sensitive systems in the automobile from after-market consumer electronics. The gateway would have separate ports for interfacing with legacy networks and consumer buses. The gateway would also host software for managing the various services envisioned for internet-connected vehicles. For example, maintenance information would enable manufacturers to learn how their vehicles are actually used or enable consumers to evaluate the need for repairs and determine the effectiveness of repairs by
comparing data before and after. Other potential uses could include uploading of entertainment information and locating nearby retail stores, restaurants, or service stations.
A vital function of the gateway in making such services economical is management of the communications links. Presently, cell phones have a much higher cost per bit delivered than other means of communication. However, if the automobile also has a short-range broadband link, such as IEEE 802.11b, then information might be processed and stored until it can be uploaded to a home computer when the car is parked near the residence. In a similar way, entertainment information or software upgrades could be downloaded overnight. Another approach would be to communicate over high-speed links at a gas station during refueling, for example, to receive updated information or complete a purchase of digital audio files. For very high-priority services, such as emergency assistance, the cell phone would be used, rather than waiting until a high-speed port comes into range. Based on the vehicle operator’s preferences, the gateway could choose an appropriate mix of local processing, storage, and communications that would provide services at the desired costs.
The high-level requirements for the design of the gateway are surprisingly similar to the requirements for the development nodes described in the first scenario for conducting large-scale data collection experiments. Common requirements include real-time components, general purpose processors, wired and wireless network communication interfaces, application program interfaces that permit construction of software by third parties, and remote controllability via the Web. Although the devices are quite different, the same architecture applies. For a vehicle, the gateway may have some devices that respond to the physical world directly, or such devices may be accessible through local area networks in the vehicle. For the sake of economy, some of these devices and/or the gateway would perform local processing. Rather than sending a continuous record of engine temperature, for example, detailed reports might be stored only when temperatures cross a critical threshold or when the temperature is high and another sensor indicates possible problems. Further processing might even make a preliminary diagnosis, after which a query to an expert system located on the Web might be made. In this way, the vehicle would not have to host the complete diagnostics system.
Remote monitoring and control would also be attractive for other reasons. Vehicle owners will probably not want to program their preferences while operating the vehicle, and any sensible regulatory regime will surely discourage driver distractions. Scaling is also a concern. Providing services to millions of vehicles presents enormous challenges, both in terms of the huge volume of data that can be generated by vehicles and the quantity of entertainment information that may have to be transported to them. With a gateway and back-end web-server network that enables remote downloading of software, many different companies will be able to compete for providing information services to automobile owners.
CONCLUSION
Intertwined network processing is a central feature of systems that connect the physical and virtual worlds. Research is now proceeding on the design of small, specialized nodes that could potentially be deployed in very large numbers and on the creation of dense networks of larger nodes that can be used to learn more about the types of networking, sensing, and signal processing that will be needed in future systems. Because of constrained communications, design considerations for scalable networks will be similar even if data rates and processing capabilities vary greatly. Signal processing and communications must be considered together for a very broad range of systems that interface to the physical world.
REFERENCES
AMI-C (Automotive Media Interface Collaboration). 2001. Available online at www.ami-c.org/home.htm.
Asada, G., M. Dong, T.S. Lin, F. Newberg, G. Pottie, H.O. Marcy, and W.J. Kaiser. 1998. Wireless integrated network sensors: low power systems on a chip. Pp. 9–12 in Proceedings of the 24th IEEE European Solid-State Circuits Conference. Den Hague, The Netherlands: Elsevier.
Bult, K., A. Burstein, D. Chang, M. Dong, M. Fielding, E. Kruglick, J. Ho, F. Lin, T.-H. Lin, W.J. Kaiser, H. Marcy, R. Mukai, P. Nelson, F. Newberg, K.S.J. Pister, G. Pottie, H. Sanchez, O.M. Stafsudd, K.B. Tan, C.M. Ward, S. Xue, and J. Yao. 1996. Low power systems for wireless microsensors. Pp. 17–21 in Proceedings of International Symposium on Low Power Electronics and Design. Monterrey, Calif.: IEEE.
Dong, M.J., G. Yung, and W.J. Kaiser. 1997. Low power signal processing architectures for network microsensors. Pp. 173–177 in Proceedings of 1997 International Symposium on Low Power Electronics and Design. Monterrey, Calif.: IEEE.
Kumar, S. 2001. Sensor Information Technology. Available online at www.darpa.mil/ito/research/sensit.
Lin, T.-H., H. Sanchez, R. Rofougaran, and W.J. Kaiser. 1998. CMOS front end components for micropower RF wireless systems. Pp. 11–15 in Proceedings of the 1998 International Symposium on Low Power Electronics and Design. Monterey, Calif.: IEEE.
Pottie, G.J., and W.J. Kaiser. 2000. Wireless integrated network sensors. Communications of the ACM 43(5):51–58.







