
7
Roadmaps to the Future
This chapter provides roadmaps for the development of unmanned ground vehicle (UGV) systems that would be similar to the examples described in Chapter 2. It also provides a science and technology (S&T) roadmap for the Army that takes into account technologies of immediate importance to the Future Combat Systems (FCS) program as well as investigations that will be required for longer-term upgrades (2015 and beyond) of UGV capabilities for the Objective Force.
MILESTONES FOR SYSTEM DEVELOPMENT
Trends in robotics developments and autonomous intelligence support an evolution of UGV systems. Figure 7-1 illustrates that the Army envisions UGVs as playing an evolving role in combat missions and operating with increasingly higher levels of autonomy.
In Chapter 2 the committee postulated four examples of unmanned ground vehicles with a progression of capabilities: Searcher, Donkey, Wingman, and Hunter-Killer. It was necessary to do this to provide a basis for estimating technology readiness levels (TRLs) for each of the technology development areas in Chapters 4 and 5. The technical requirements for the example systems provide for increasing capabilities consistent with the evolution depicted in Figure 7-1. Further, given a sufficiently funded and dedicated effort, each of the postulated systems could be developed within predictable time frames. To be successful, however, it will be necessary to capitalize on vigorous evolutionary and spiral development processes, and to effectively integrate the technologies using modeling and simulation, assessment, and software engineering methods as described in Chapter 6.
The level of autonomy required is clearly higher for more complex applications and missions. As complexity advances from a basic Searcher UGV to a sophisticated Hunter-Killer, the degree of trust in and the independence of the robotic vehicle system increase to a level of “responsible” autonomy, in which only minimum-acceptable controls over the robot have been retained. But total autonomy in robotic vehicles is unlikely to be achieved even in the far term, and it should not be the goal in developing UGV systems for the Army.
The examples were all postulated to operate as part of human–robotic teams with varying requirements for autonomy that will depend upon such things as military doctrine, rules of engagement, and local dictates of a field commander. Army UGVs should be designed to function as part of a soldier-robot team, and much of the requirement for new technology development will depend on the degree to which the UGV is expected to function on its own versus in a team environment.
Figure 7-2 depicts developmental relationships between system capabilities of the four example UGV systems. Each system builds on one or more of the capabilities demonstrated by a predecessor system so that the technology developments have a cumulative effect, providing a path for the evolutionary development of multiple UGV capabilities for the Army.
The chronology at the bottom of Figure 7-2 results from the earlier TRL estimates of technological maturity for the fundamental UGV technologies required for the example systems. Between successive systems the figure lists the mission capabilities that would also need to be pursued with the enabling UGV technologies to accomplish the applications envisioned for the postulated example systems. Many of these capabilities are now being pursued in separate programs by the Army.
FCS Program Planning
The notional program plan for the Future Combat Systems, as briefed to the committee in 2001, is shown in Figure 7-3 (Johnson, 2001). The committee determined that the
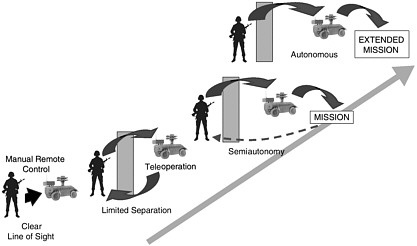
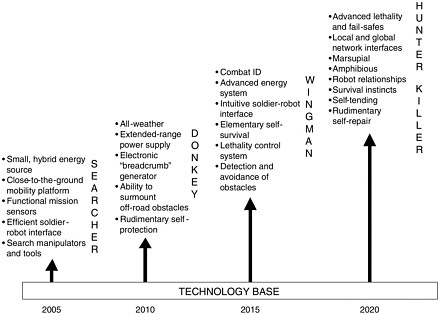
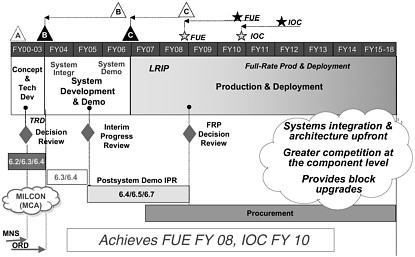
FIGURE 7-3 Notional FCS acquisition program. SOURCE: Johnson (2001).
overall Army UGV development program does not currently provide a basis for including UGVs with a high degree of autonomy in the initial FCS. Depending on the FCS requirement for UGVs, however, a special task force for the Assistant Secretary of the Army for Acquisitions, Logistics, and Technology (ASA [ALT]) concluded in early 2002 that a system-level insertion of a UGV system in the semiautonomous preceder/follower class should be possible as a block upgrade to FCS by 2009 and a UGV system in the network-centric autonomous capability class by 2025.1
Figure 7-4 depicts the most optimistic milestone dates for development of the example applications from a pure engineering perspective. It shows that the particular progression of example UGV system developments postulated by the committee could lead to insertion of a Hunter-Killer UGV in FCS in 2025. But the milestone dates assume that all of the capability gaps, even those identified as difficult and risky, will be filled in a timely fashion (see Tables 4-6 and 5-5 in Chapters 4 and 5, respectively). It is important to note that these milestones depend on knowing the objective capabilities desired for Hunter-Killer at the outset and that they do not take into account the many parallel developments not unique to UGVs, such as the mission-function equipment, high-performance engines, and network-centric communications, that undoubtedly will also be needed for FCS systems.
The examples used in the study resulted in lower TRLs (and more extended time lines) in large part because the committee believes that requirements for FCS UGVs will be much more demanding than indicated in field demonstrations of component technologies. Virtually all of the research and development work is being conducted under conditions that are much less harsh than the battlefield conditions under which UGVs will have to operate to be useful to the Army. In particular, the committee found that technologies that may appear to be relatively advanced when tested in good weather, on known terrain, with difficult obstacles removed, and with no enemy countermeasures are at a significantly lower TRL for military applications that are likely to be conducted in adverse weather over unmapped terrain in the presence of obstacles, obscurants, and electronic countermeasures.
Roadmaps for Technology Development
Figures 7-5 through 7-8 are technology development roadmaps for the specific examples described in Chapter 2. As with Figure 7-4, the roadmaps assume that all capability
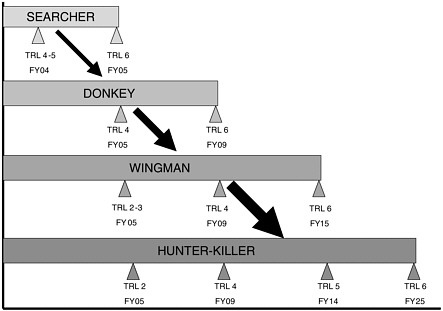
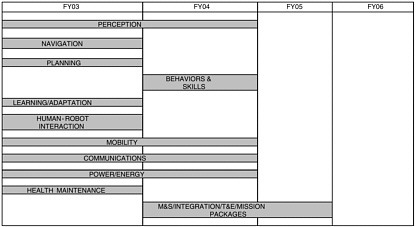
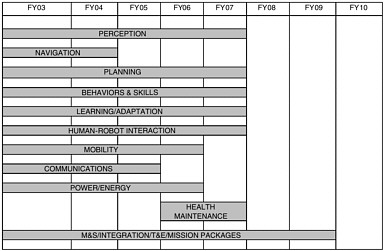
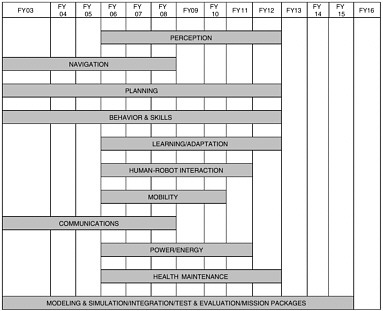
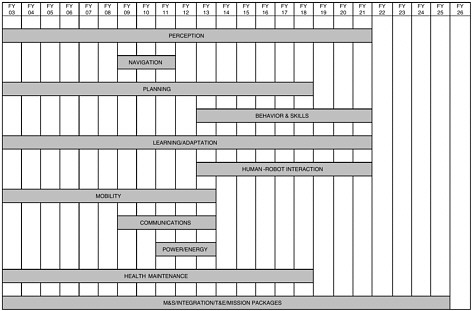
FIGURE 7-8 Technology development roadmap for the Hunter-Killer indicating the year TRL 6 will be reached for the system.
gaps identified by the committee are filled in a timely fashion. The roadmaps are interdependent, each building on research and development (R&D) accomplished to achieve capabilities needed in a preceding system. While the TRL 6 estimates in Chapters 4 and 5 were based on readiness to support individual example systems, the roadmaps in Figures 7-5 through 7-8 are based on the expectation that the advanced capabilities needed by the Hunter-Killer would be identified as goals from the beginning.
TIME LINES FOR GENERIC UGV SYSTEMS
Having evaluated the readiness of various UGV technologies to support development of specific UGV systems postulated for each of four broad UGV capability classes, the committee was able to estimate time lines for the development of tactically significant, generic, “entry-level” systems. In doing so, it assumed that “entry-level” teleoperated ground vehicles (TGVs) now exist. Figure 7-9 takes the technology development roadmaps for specific examples and generalizes to estimated time lines for the Army to field an “entry-level” semiautonomous preceder/follower (SAP/F), platform-centric autonomous vehicle (PC-AGV), and network-centric autonomous ground vehicle (NC-AGV).
The committee’s estimates are based in part on the TRL assessments made in Chapters 4 and 5 and include an additional 2 years for system engineering, technology integration, and test and evaluation for each system. These time lines take into account that technology integration for common capabilities can begin earlier when preceded by prior system developments. They do not consider parallel developments that might be required for technology developments to support mission-function packages.
Figure 7-9 also illustrates how the efforts will vary in each of the UGV technology areas. Actual differences will reflect the times needed to fill critical capability gaps in the current UGV development programs. The time line estimates in Figure 7-9, combined with Figure 7-4 and the discussion of the FCS program plan, provide the basis for the answer to Task Statement Question 5.a in Box 7-1.
Priorities for UGV Development
Current Army developments address near-term capabilities, and the study showed that the achievement of technology objectives in pursuit of defined systems would facilitate the development of multiple capabilities, both near- and far-term. This should be an important consideration in establishing Army priorities. While the Army S&T plan should concentrate on difficult technological challenges, advances are needed in all areas if UGV systems are to be fielded with FCS. Specific recommendations for the priority of UGV technology developments in the Army’s S&T plan are given in Recommendation 1 of Chapter 8.
|
BOX 7-1 Task Statement Question 5.a Question: From an engineering perspective, what are reasonable milestone dates for a UGV system development program leading to production? For example, does the current FCS program have a coherent plan and roadmap to build UGVs for FCS and the Objective Force? Answer: UGV requirements for FCS have not yet been defined, so the current FCS program does not have a coherent plan and roadmap to build UGVs. Figure 7-4 provides reasonable milestone dates from an engineering perspective for development of four specific example systems with many of the capabilities that may be needed for FCS. It should be emphasized that the milestones are optimistic estimates for UGV systems of unquestioned utility on the battlefield and not for entry-level systems or prototypes. Figure 7-9 provides reasonable estimates for “entry-level” UGV system developments in generic capability classes. |
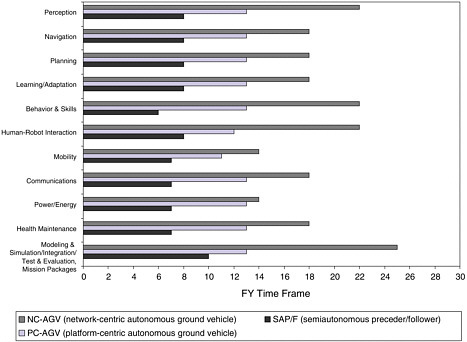
FIGURE 7-9 Technology roadmap for development of generic “entry-level” systems in capability classes. The milestones are based on achievement of TRL 6 in each technology area.







