
5
Supporting Technologies
An unmanned ground vehicle (UGV) system encompasses the broad technology areas shown in Figure 5-1. Enabling technologies for core autonomous behavior were reviewed in Chapter 4. This chapter assesses the state of the art in UGV supporting technologies for human–robot interaction, mobility, communications, power/energy, and health maintenance. Each section describes the scope of the technology areas, estimates technology readiness levels, and identifies technology gaps.
HUMAN–ROBOT INTERACTION
This section defines the scope of the human–machine interaction technology area. It describes the state of the art, estimates technology readiness, describes capability gaps, and identifies salient uncertainties.
Definitions
Human–robot interaction (HRI) covers the macrocosm of how intelligent agents work together in a system. It encompasses human–robot interfaces, which are specialized human–computer interfaces for the particular needs of HRI in a defined system but is much broader. Human–robot interaction is not synonymous with human-centered computing, whereby computers augment human ability, but it is assumed that the principles of human-centered computing or design will be applied to HRI systems when appropriate.
HRI has recently emerged as a topic of research, in part due to the shift in the AI community from a goal of fully autonomous robots operating in isolation (e.g., a planetary rover) to service robots operating side by side with humans under some form of semiautonomy. HRI appears on the Department of Energy (DOE) Robotics and Intelligent Machines Roadmap as one of the four basic areas (DOE, 1998a).
HRI is particularly relevant to the Future Combat Systems (FCS) concept because it addresses how humans will interact with multiple robots (particularly in times of stress and cognitive fatigue), how responsibilities will be dynamically allocated between humans and robots based on the context, and how the impact of uncertainty and information overload can be mitigated. HRI is instrumental in reducing training times and providing a common interaction mode if users are expected to control UGVs and unmanned aerial vehicles (UAVs).
State of the Art
Human–robot interaction has been gaining momentum as a separate field of study either directly or as a conclusion since 1996. HRI is a cross-disciplinary area, populated by the robotics, artificial intelligence, cognitive science, and human–computer interface (HCI) communities. The motivation for HRI has stemmed from a variety of sources.
HRI studies and technology are clearly needed to minimize the hidden costs of robot systems before they can be fielded. The state of the practice for unmanned systems to date is multiple operators per system. This is true for all fielded UAVs (such as Pioneer and Predator) and prototypical UGVs (including XUV and TMR robots). The TMR (tactical mobile robots) program thus far, for example, has demonstrated several prototype component systems, but none has a 1:1 human-to-robot operational ratio. Although designed to be controlled by a single person, the Urbans, Solem, and Packbot robots require two people for carrying to the field and others to perform planning and maintenance chores. Additional operators are needed to trade off controller duties for extended-duration missions.
Health care robots and toys have brought robots to a different class of end user who does not have and does not want to obtain specialized robotic skills, necessitating new modes of interaction. Work in HCI has shown that people often work better with more naturalistic or social interfaces; this assessment is expected to transfer to robots, with people
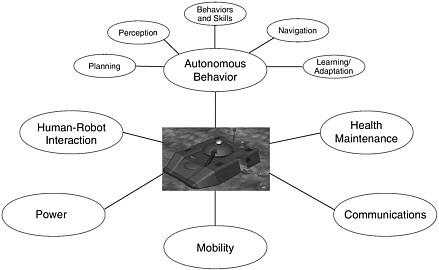
FIGURE 5-1 Areas of technology needed for UGVs.
expecting to deal with robots as creatures with their own personality and motivations.
The HRI literature is limited and mostly associated with a series of workshops sponsored by DOE, the National Science Foundation, and Defense Advanced Research Project Agency (DARPA) (DOE, 1998a; Murphy and Rogers, 2001). One outcome of the literature is a preliminary taxonomy of the issues in HRI proposed in the 2001 DARPA/ National Science Foundation Study on Human–Robot Interactions (Murphy and Rogers, 2001). The taxonomy consists of six issues in HRI: communications, modeling, teamwork, usability and reliability, application domains, and representative end users. Of these, communications, modeling, teamwork, and usability and reliability are relevant for FCS vehicles. Application domains and representative end users are not of interest in this study because the FCS program specifies the application and user.
Murphy and Rogers (2001) describe the many facets of communications in HRI:
Direct human–robot communication is possibly the most obvious issue. Modalities include speech, vision, gestures, and teleoperation, though there may be other forms. Mediated human–robot communication is another topic. This arises from virtual environment, graphical user interfaces, and can be enacted by collaborative software agents. The physical interaction and interfaces impact communication. These methods include physical interaction between robots and human, mixed-initiative interactions between humans and robots, and dialog-based interaction.
Murphy and Rogers (2001) also describe the scope of modeling.
Modeling issues spanned traditional concerns (cognitive, task and environment modeling) to more HRI specific concerns. Cognitive modeling of human reasoning, behavior, intention and action is needed for imitation (i.e., robot learns how to behave from the human) and for collaboration (i.e., robot understands what the human is doing within the context of the task) [as well as the human understanding of robotic behavior to ensure that the behavior fits the human’s mental model and avoid what might be characterized as “clumsy automation”]. Task and environment modeling is needed as a basis for performance. Other modeling issues are social relations, learning, and methods.
Teamwork is particularly relevant for control of unmanned platforms for the military. Teamwork issues can be divided into architectures and task allocation. Architectures focus on the optimal organization of teams (e.g., multiple robots and a single human, multiple humans and a single robot, multiple robots–multiple humans). Research into architectures is expected to determine the situations that require authoritarian, hierarchical relationships and those that require more democratic structure. While architectures are being investigated by the multiagent community, they often neglect questions of how a single robot can work with more
than one human, balancing multiple demands, and how tasks can be traded between humans and robots as needed to prevent human mental or sensory overload.
Task allocation in human–robot teams is important because each partner in the team has skills that the other lacks, including intelligence skills. One example is the correct partitioning of skills. In surgery robotics it may be easy to determine a human’s handshake and the limits of visual acuity, but it is much more difficult to detect deficiencies in spatial reasoning. It is not clear what we need to know about environments, tasks, humans, and robots to be able to optimize mission performance even if we knew the capabilities of the human and robot (Murphy and Rogers, 2001).
A major issue is the overall utility of HRI systems. What are the appropriate metrics for evaluating the success, effectiveness, and quality of human–robot teams and can such metrics be task independent? The need for metrics also emphasizes the need for benchmarks to directly compare work in the HRI arena with other aspects of performance and to determine where the effectiveness of different human–robot interfaces can be measured. Usability studies involving the task analysis of users and measures of utility for the different types of human–robot relationships are also warranted (Murphy and Rogers, 2001). This taxonomy of communications, modeling, teamwork, and usability and reliability emphasizes HRI as a systems-level design set of issues, not a specific enabling technology. Advances are needed in all elements of the taxonomy, particularly modeling. Of these elements, social informatics (the number and organization of the agents, the roles they play, how they transition between roles, how they collaborate and how they interact safely) is probably the area must familiar to the public, since it includes robots that express emotions and can interpret and respond to the emotions of end users. This type of social informatics is of interest to the entertainment industry and has captured media attention, but it should not be considered the ultimate definition or goal of HRI.
Foreign Technology Development
European and Japanese interest in HRI appears to be driven by the service robot sector, with no direct relevance to military operations. In Europe the Royal Institute of Technology in Stockholm is the leader in HRI, whereas in Japan work is distributed. The work out of Sweden (Kerstin Severinson-Eklundh) is possibly the most advanced in general human–robot interaction, but the field is still immature and no one has a lead.
Current Army Capabilities
The only aspect of HRI addressed by current Army UGV programs is communications to provide the needed operator interfaces. While these programs have incorporated HCI design principles, it is clear that the larger scope of HRI has not been covered. HCI is one subset of HRI, and HRI is often confused with HCI. HRI is concerned about the entire information process and groups of people. HRI focuses on such issues as visualization of information (e.g., whether a polar plot or a three-dimensional surface plot is a better representation for the user’s needs) rather than the HCI aspect of whether the display controls, for example, are incorporated with radio buttons. To illustrate, an encouraging attempt was made to resolve an HRI issue in the DARPA TMR program when a project was undertaken to assess which operator skills were necessary to control a robot effectively for significant periods of time under heavy cognitive loading using existing interfaces. Unlike the HCI, which can be added later (although at some cost penalty), a good HRI design must be integral to the entire specification, design, implementation, and evaluation process for the UGV system. A significant investment in testing will be needed just to ascertain the realistic possibilities for reducing human attention and errors during operations of FCS UGVs.
HRI is nascent and has not been systematically explored or applied in military UGV applications. This is likely due to the Army’s emphasis on demonstrations rather than fieldable UGV systems. Although not included in past UGV developments, research in HRI is planned in the emerging Army Collaborative Technology Alliance (CTA) for robotics. This is important because interfaces designed independently of the other elements of HRI are not as likely to be effective. It is not surprising that the other elements of HRI (modeling, teamwork, usability and reliability) have also been overlooked.
The Donkey, Wingman, and Hunter-Killer example systems all require levels of interaction that have not been previously investigated. Donkey must be capable of asking for guidance and Wingman must be capable of close (but minimal) interface with soldiers. Wingman must also be capable of multimodal interfaces (optional teleoperation).
Natural user interfaces are assumed essential for battlefield scenarios and are the hardest gap to fill. Aside from degree and mode of interface, interaction requirements for Wingman and Hunter-Killer will not be completely determined without some experimentation. It is believed that Hunter-Killer will require methods for interacting and intervention by soldiers under stress, and it will probably need near-autonomous control algorithms to support multiple operators (and/or robots) on the battlefield. Training for the soldier must also be comprehensive enough to include a complete understanding of the robots’s repertoire of behaviors and when they will be executed especially in the more autonomous modes.
Technology Readiness
Except for the Searcher, which has no interaction requirements beyond interface controls, the technical readiness level of HRI technologies vis-à-vis the example UGV
systems is at TRL 1 (technology readiness level) or less. Telesystem control algorithms to support one operator per robot (as needed by the Searcher) are at TRL 5. Semiautonomous control software to support multiple robots (as needed for Donkey systems) has been developed and is at TRL 4 or 5.
Salient Uncertainties
There are two types of gaps between the current state-of-the-art HRI capabilities and the projected needs: interfaces (or the mechanisms by which the human communicates with the robot and interprets the output) and control scheme (or the partitioning of roles and responsibility among the human and robotic agents).
The interface needs are largely high risk, because it is assumed they will require more naturalistic interfaces. One example of a naturalistic interface is speech, also known as natural language processing (NLP), or the use of gestures when speech is not permitted. These interface needs are complicated by the remote operation of a robot, which will normally mean that an operator is not within the physical line of sight, unlike remote control of a television, which can be performed only when the remote control shares a physical line of sight with the television.
Speech and gesture interfaces are currently being explored and appear promising, though much work needs to be done for application to noisy environments. NLP and hand gestures represent only a fraction of the ways information can be communicated, and it is expected that perceptual user interfaces that cover multiple modalities will become of increasing importance.
The control scheme is related in that a poorly designed interface can make a system hard to control. The control scheme refers to the underlying organization of responsibilities. In a teleoperated system the human plays an active role, usually consuming 100 percent of the available time. In practice, teleoperated robots often require multiple operators, making the 1:1 ratio ambitious. In the Donkey scenario the goal is one operator per herd. This requires that the Donkeys be given some autonomy, similar to a horse, in order to make the low human-to-robot ratio feasible. In the Hunter-Killer example the control is almost fully autonomous for many reasons. While the 1:6 ratio seems only an incremental advance over the Donkey 1:5 ratio, the Hunter-Killer requires heterogeneous robots: robots that have inherently different physical or software capabilities. As a result it becomes increasingly harder for an operator to keep up with the differences and the ramifications of those differences.
Perhaps the most glaring uncertainty is what will be discovered in field experiments. HRI is resource intensive and requires that many people be tested in realistic conditions over a significant period of time. It will be hard to fill all of the gaps in technology; therefore the Army should begin with investigations that are systemically planned to meet the operational requirements of the UGV systems. These include:
|
BOX 5-1 Task Statement Question 4.b Human–Robot Interaction Question: What are the salient uncertainties for the other main technology components of the UGV technology program (e.g., adaptive tactical behaviors, human–system interfaces, mobility, communications)? Answer: HRI requirements for Army UGVs will be much more demanding than those for commercial developments. Advances in HRI technology will enable reductions in manpower needed to control UGVs of all classes, so satisfaction of these requirements is key to the acceptability of robots on the battlefield. Past research in implementing AI-based tools in operational settings has demonstrated that understanding how the human will use and respond to, as well as what is expected from, the tools is paramount for success. The most glaring uncertainty is which HRI technologies will be needed to meet the Army’s requirements once it settles on operational requirements and begins to perform field experiments. HRI research is resource intensive and will require many tests under realistic conditions over a significant period of time. |
basic interfaces to minimize soldier-operator fatigue; NLP, natural-user, and multimodal interfaces; algorithms for multiple operators; and HRI requirements for employment of heterogeneous robots.
The foregoing provides the basis for the answer to Task Statement Question 4.b as it pertains to human–robot interaction. See Box 5-1.
Recommended Research and Development
The HRI areas in which the Army is most vulnerable are modeling and usability and reliability. The robotics community is addressing teamwork and that work should be transferable; however, modeling of the task and the capability of the agents are highly domain specific, as is means of ensuring usability and reliability. Therefore, the Army cannot rely on academia to provide this important component. The failure to have a good understanding of the HRI requirement will likely result in a mismatch of human–robot abilities. As a consequence, for example, there may be too few humans allocated per group of robots to handle unexpected problems in real time, jeopardizing the mission. HRI should provide a realistic assessment of the proper human to robot ratio and ways to streamline the interactions. The Army should do the following:
-
Integrate HRI into FCS design concept, since it is pervasive.
-
Initiate an applied research program to study and model roles, cognitive abilities, team organization,
-
responsibilities of team members, and robotic behaviors that are consistent with soldier expectations and mission success. In particular, model the transitions in responsibility and control (e.g., rather than wait, robot will assume initiative in Case X).
-
Initiate an applied research program to model dynamic allocations of responsibility, particularly interruptions while the human is doing one task and must suddenly respond to a crisis detected by the robot. The modeling should focus on how to provide relevant, timely information to the human to mitigate the notoriously poor quality of decisions made by humans in interruption studies.
Useful HRI studies should be possible within the next three years. These do not require the development of new hardware but rather require access to the FCS concept and intended users to determine technical requirements for HRI architectures and task allocation.
MOBILITY
This section defines the scope of the mobility technology area. It describes the state of the art, estimates technology readiness, and identifies salient uncertainties.
Definition of Mobility
“Mobility” is the term used to describe the ability of the robotic vehicle to traverse a rough terrain without any perception. The mobility of a UGV is often expressed in terms of the size of an obstacle (both negative and positive) it can negotiate and still continue along a specified path. As pointed out in U.S. Army (1998), for several reasons a UGV must have a high degree of mobility:
-
A high degree of mobility minimizes the perception burden.
-
Timely mission accomplishment cannot be achieved if the platform has to spend its time searching for an easy path through difficult terrain.
-
The best route for covert missions will mostly likely not coincide with the easiest mobility route.
-
A high degree of mobility will keep the vehicle from becoming stuck, thus requiring human assistance.
State of the Art
Most UGVs can be categorized in one of three forms: wheeled, tracked, or hybrid (combination of wheeled and tracked). Wheeled vehicles are the simplest, quietest, and most reliable. Tracked vehicles are known to have better traction and flotation than wheeled vehicles on such slippery surfaces as mud fields, rice paddies, and snow; unfortunately the tracks are more susceptible to breakage and are noisier in general.
As explained in U.S. Army (1998), there are several criteria used to evaluate the mobility of a UGV. For discrete obstacle negotiation, the criteria include tree and stump knock-over, gap crossing, fording water, vertical step crossing, and tree and stump avoidance. For all-terrain mobility the criteria include horsepower per ton, axial twist, ground pressure, vehicle cone index (VCI), forward/reverse slope, side slope operation, side slope stability margin, width for rollover resistance, side step clearance height, high-low speed range, and ground clearance. Table 5-1 shows the desired criteria for a high-mobility UGV weighs less than 2,000 lb. and can be transported in an high-mobility multi-purpose wheeled vehicle (HMMWV) (U.S. Army, 1998).
Table 5-2 shows the specifications of the Demo III XUV (experimental unmanned vehicle) and several U.S.-produced teleoperated UGVs that have been developed for explosive handling, SWAT (special weapons and tactics), HAZMAT (hazardous materials) response, nuclear power plant surveillance and maintenance, and airport security (Shephard’s, 2001). The Gecko and Mini-Flail were designed and built for the Department of Defense UGV Joint Program Office. There are also foreign platform options from Canada, England, and Ireland (Shephard’s, 2001). As shown in the table, with the exception of the Demo III XUV, these UGV platforms are skid-driven systems that have been designed for much slower speeds than are needed for the Wingman
TABLE 5-1 Desired Criteria for a High-Mobility UGV Weighing Less Than 2,000 Pounds
|
Discrete Obstacle Negotiation |
Desired Criteria |
|
Tree and stump knockover |
2–3 ft stump |
|
Gap crossing |
1–2 m |
|
Vertical step crossing |
18–24 in. |
|
Fording water |
4–5 ft deep |
|
Tree and stump avoidance |
9–12 in. random spacing |
|
Berm climbing |
39 in. desired |
|
Mobility |
|
|
Hp/ton |
20–40 |
|
Axial twist |
±10 degrees |
|
Ground pressure |
1–2.5 psi |
|
Vehicle cone index |
Less than 12 with 6 being desirable |
|
Forward/reverse slope |
60% |
|
Side slope operation |
60% |
|
Side slope roll stability margin |
0.3 |
|
Width for rollover resistance |
T/2H >= 1.1 required with T/2H = 1.3 desired |
|
Side step clearance height |
20 in. goal with 24 in. desired |
|
High-low speed range |
1–30 mph |
|
Ground clearance |
10–12 in. nominal with variable 4–24 in. desired |
|
SOURCE: Data from U.S. Army (1998). |
|
TABLE 5-2 Current Options for Army UGV Mobility Platforms
and Hunter-Killer example applications. Speed considerations have not been emphasized in the mobility designs for existing systems, because existing interface technologies cannot support teleoperation of UGVs at high speeds.
The Army is pursuing platforms to support UGV requirements of the science and technology objective (STO) programs and demonstrations and the Joint Robotics program. The Army Tank-Automotive and Armaments Command (TACOM) is currently contracting with General Dynamics to have a new 6 × 6 vehicle built as part of the Joint Robotics Program/Mobility Enhancement program (JRP/ MEP).
The study provided to the committee by TACOM (U.S. Army, 1998) suggests that a 6 × 6 vehicle would have improved mobility over the Demo III XUV. The study states that “the best 4 × 4s do not do well in mobility and immobilization resistance. The proposed 6 × 6 vehicle will have “better mobility than the 4 × 4, slightly better immobilization resistance, but much poorer stealth compatibility and utility.” The gap crossing of the 4 × 4 vehicle is approximately two-thirds the diameter of a tire (21 inch for a 32 inch diameter wheel), while the gap crossing of the 6 × 6 vehicle will be approximately the length between two of its wheels (approximately 34 inches). The 4 × 4 vehicle has a VCI of 12 while the 6 × 6 vehicle will have a VCI of 6. The U.S. Army report (1998) also suggests that an even better technical approach is “an 8 × 8 configuration with two swiveling halves and ‘mesh’ track overlays, achieving the mobility and
immobilization resistance of tracks, the signature mitigation of wheels, and the best maneuverability and obstacle avoidance features of both.”
Technology Readiness
Commercial and academic prototypes of UGV platforms, some built as part of the DARPA TMR program, are adaptable to mobility requirements of the Searcher example. Several of these were successfully demonstrated during recovery operations at the World Trade Center site and in the caves of Afghanistan. These platforms are at TRL 6.
Two prototype vehicles are being developed under the DARPA UGCV program discussed in Chapter 3. The Carnegie Mellon Spinner prototype vehicle will be a 6-ton vehicle with a mobility subsystem incorporating a 6-wheel drive designed to be capable of off-road operation; the Lockheed Martin Retauris prototype vehicle will be a 1,300-pound hybrid-electric vehicle with a mobility drive system consisting of six suspension arms capable of 360-degree rotation with electric-motor wheel drives. A 12-month testing phase is intended to help identify mobility technologies for potential application to the Army’s FCS program and to evaluate characteristics such as air deployability and resilience to terrain-induced damage. Both prototypes have possible applicability to the Hunter-Killer example system and are estimated to be at TRL 1.
The technology readiness level of a 4 × 4 mobility platform such as the Demo III XUV vehicle is TRL 7. This mid-sized platform has been demonstrated in field environments and might be adapted to the Donkey example applications. A new 6 × 6 mobility platform, possibly adaptable to a prospective Wingman or Hunter-Killer platform, is currently at TRL 2. Building on past experience with designing and building the XUV, the 6 × 6 platform could be at TRL 6 in 2 years; however, it is doubtful that cross-country speed requirements can be met using existing design approaches.
Salient Uncertainties
Overall, the risks associated with building highly mobile platforms may be less than that of developing perception sensors and software that will successfully guide a vehicle around every possible obstacle. We still need processing power several orders of magnitude greater than is currently available to reach the perception ability of the human brain. The alternative to a UGV with human-like perception is a highly mobile UGV that can negotiate any obstacle in its path. It may get knocked down, tumble, roll, and bounce off obstacles, but it will get to its destination due to superhuman (in terms of speed and strength) mobility. A highly mobile, minimal-perception UGV is also appealing in terms of survivability. After all, the first thing that the enemy is going to do is to shoot at and try to destroy the perception sensors on the vehicle. So the less we rely on these sensors, the more reliable the system will be. Finally, the U.S. Army has considerable experience in mobility design, as demonstrated with the design of the tank and other terrestrial and amphibious military vehicles. With this experience the path of minimal risk may be to spend more effort on developing highly mobile platforms.
Of course, developing highly mobile platforms that have less perception capability will alter the missions in which UGVs will first be used. Instead of scouting and stealthy reconnaissance missions UGVs would be used in the “red zone” in such brute-force missions as clearing fires, diversion, barricade bashing, and breaching minefields. These missions require great mobility, size, and speed. Obstacle avoidance sensing can be very simple with bumpers and local infrared (IR), radar, and acoustic proximity sensors.
Depending on requirements, UGV health maintenance technologies (discussed later in this chapter) for such things as diagnostics and self-maintenance will overlap with and simplify traditional supportability, maintainability, and reliability considerations. The scope of logistics concerns will be similar to those for other military mobility platforms, but the impact on logistics operations will depend on specific UGV capabilities.
Mobility requirements for ground vehicles continue to stress improved performance on off-road terrain. Smart active-suspension systems, new tire materials with controlled inflation, and high-performance traction with slip control for each wheel are examples of technologies in likely need of refinement to meet UGV requirements. An uncrewed vehicle has the advantage of not needing to be designed around human crew limitations but also has the disadvantage of needing mechanisms to replace human driving judgment. Thus, design requirements for UGV mobility platforms must be integrated with perception technologies to provide the capability to avoid obstacles, both positive and negative, that the platform is not hardened to overcome.
The foregoing discussion provides the basis for the answer to Task Statement Question 4.b as it pertains to mobility. See Box 5-2.
Areas of Research and Development
Research and development is needed in the following areas:
-
Many of the analysis tools and metrics developed for the design of military vehicles such as the tank and HMMWV use soil mechanics models that may not apply to smaller, lighter UGVs (Laughery et al., 2000). These models will need to be verified on smaller platforms and possibly altered based on theoretical analysis and experimental data.
-
The mobility platform is highly application dependent. The platforms developed for the Searcher, Donkey, Wingman, and Hunter-Killer applications
|
BOX 5-2 Task Statement Question 4.b Mobility Question: What are the salient uncertainties for the other main technology components of the UGV technology program (e.g., adaptive tactical behaviors, human–system interfaces, mobility, communications)? Answer: The mobility platform is highly application dependent. The platforms developed for different mission applications will need to be designed based on well-defined mission requirements. Mobility requirements for ground vehicles continue to stress improved performance on off-road terrain. While a UGV has the advantage of not needing to be designed around human crew limitations, it also has the disadvantage of needing mechanisms to replace human driving judgment. Thus, salient uncertainty surrounds how design requirements for UGV mobility platforms can be integrated with perception technologies to provide the capability to avoid obstacles, both positive and negative, that the platform is not hardened to overcome. Overall risks associated with building mobility platforms may be less than that of developing perception sensors and software for successful A-to-B mobility. An alternative might be a highly mobile UGV that can negotiate any obstacle in its path. It may get knocked down, tumble, roll, and bounce off obstacles, but it will get to its destination due to superhuman (in terms of speed and strength) mobility. A highly mobile, minimal perception UGV is also appealing in terms of combat survivability. |
-
will need to be designed based on well-defined mission requirements. The current readiness of a 4 × 4 mobility platform such as the Demo III XUV vehicle is TRL 7. This platform has been successfully demonstrated in an operational environment. The new 6 × 6 mobility platform is at TRL 2. Building on past experience with designing and building the XUV, General Dynamics should be able to bring the 6 × 6 platform up to TRL 6 in two years. The proposed 8 × 8 platform mentioned in U.S. Army (1998) should also be investigated.
COMMUNICATIONS
Current military data links that are available to support UGV communications were developed to transport a specific set of information from one platform to another. Preplanning to arrange for using these communications channels is often logistically complex. Communications must generally be manually planned prior to an operation and controlled manually during the operation.
Over the last 15 years the commercial world has been the source of an enormous investment in data networking. Unfortunately, as the Internet has flourished in the commercial world, it has been largely tailored to the needs of a highly available static, wired network. Often these protocols that rely on a highly available static network do not meet the military requirements for mobility and redundancy.
In recent years, however, commercial Internet users have begun to desire support for a variety of mobile users with a certain level of horizontal and vertical data hand-off requirements. In some cases, the emerging protocols for IP mobility may be of some use to the military tactical mobility problem. Unfortunately, however, these protocols too often lack the necessary redundancy and independence from a fixed infrastructure that is required for a military network. When the commercial Internet speaks of mobility, it usually considers only mobility among users. A fixed infrastructure of wired routers is normally assumed.
The four example UGV systems defined in Chapter 2 support different military applications each having distinct requirements for communications. The Searcher would be a teleoperated UGV used to search urban environments and tunnels. The Donkey would be used as a logistical carrier to support timely delivery of supplies to the warfighter. The Wingman platform-centric autonomous ground vehicle would be used to provide combat support to a manned unit. The Hunter-Killer would be one of a collection of network-centric autonomous vehicles capable of ambushing and engaging enemy units.
The Searcher
Being a teleoperated vehicle, the Searcher requires a very-high-bandwidth, low-latency, and high-reliability communications system. Teleoperation places the communication channel directly into the control loop for the vehicle and its associated systems (sensors and weapons). Any delay in the communications system translates into a direct delay in the control loop for the vehicle. For example, fast-moving vehicles might hit an obstacle and be damaged if a 1- or 2-second delay is introduced in the time to transmit a video image back to a controller and send control back to the vehicle.
Teleoperation also implies that all of the sensor data from the unmanned vehicle that is necessary to control the vehicle must be sent back to an operator for consideration. Often this will imply real-time video or other high-bandwidth data streams. Teleoperation requires that the operator have a continuous line of communication with the vehicle being controlled. For a teleoperated vehicle a dead zone in the coverage could quickly become a black hole into which the vehicle is sent but never retrieved or operated.
Mitigating these severe requirements for bandwidth, latency, and reliability is the fact that the Searcher does not need to be operated over long distances and may even be able to drag a cable behind it. For operation with a cable, a state-of-the-art wire-line technology should be adequate to
supply the required bandwidth, latency, and reliability. A number of options are available that can reliably deliver low-latency traffic at data rates sufficient to support compressed video.
Since cables may become entangled or cumbersome in buildings or cave complexes, short-range radio frequency (RF) communications may be necessary. The physical environment in which the Searcher operates limits the availability of direct-path communications. This makes communications at video data rates at 1 km slightly out of reach of current systems. A number of emerging systems, such as enhanced wireless local area network (EWLAN), JTRS Wideband Waveform, Surgical Strike, global mobile (GLOMO), and ultra wideband (UWB) systems, may be able to support operation up to 1 km at compressed video data rates. However, significant enhancements in seamless networking to support dynamic routing, QoS, and assured connectivity will be required if the operational range for the Searcher is increased significantly beyond 1 km. As the Searcher evolves and becomes capable of executing higher-level commands, such as “climb the stairs,” the need for high-capacity, low-latency data communications will decrease. This will simplify the communications problem for the Searcher.
The Donkey
Because the Donkey is intended to carry supplies along a predefined path, communications is not a critical feature of the Donkey’s mission. The primary required communication is to interact with humans located near the start and release points of the electronic path. With the addition of appropriate security there are a number of existing military and commercial systems that would be adequate for this low data rate, moderate latency, direct-path communications. As an augmentation to the basic concept for the Donkey, operators may want to redirect the Donkey en route or provide a level of situation awareness to enhance survival. Again, a number of currently available data links could perform this basic function; however, to provide this coverage reliably over long distances would require improvements in jamming protection, signal detectability, and advanced network-routing capability that is beyond the current state of the art.
The Wingman
Because the Wingman is intended to provide close support of a manned unit, it is important that communications between the Wingman and its controlling manned unit must be moderate to high bandwidth, moderate latency, and high reliability. These communications may include transmission of compressed video from the Wingman to its controlling unit, control back to the Wingman, and shared situational awareness.
Depending on the separation of the Wingman and the controlling unit, current data links might be able to serve this function. As distances become greater and communications become necessary around obstructions, state-of-the-art communications networks will not be able to support this function. As the Wingman becomes more advanced, enhanced networking that could allow the Wingman to share situational awareness information with other UGVs, UAVs, or manned systems would be beyond state-of-the-art systems.
The Hunter-Killer
The Hunter-Killer is intended to support a mission that is doctrinally quite straightforward for a small unit of soldiers. To accomplish this mission the individual UGVs that make up a Hunter-Killer team will need to be in close communication. Current state-of-the-art communications fall significantly short of the current requirements for the Hunter-Killer primarily because of its network-centric characteristics.
Since surprise is essential to the Hunter-Killer mission, low probability of intercept/low probability of detection (LPI/LPD) communications must be enhanced significantly to support this mission.
Dynamic, autonomous local area networking in a tactical environment is a technology area that is not currently mature enough, but it is beginning to emerge in advanced technology efforts. EWLAN, small unit operations (SUO), and the GLOMO efforts are some recent programs that have demonstrated a level of dynamic autonomous operation for tactical LANs.
In principle an autonomous UGV that utilizes situational awareness information (e.g., enemy, friendly, terrain, weather) distributed within the FCS network will be very dependent on high bandwidth and assured communications. An autonomous UGV with most of its situational awareness information obtained through organic sensors would have less dependency on high bandwidth and assured communications, but it would probably cost much more, might not be able to achieve the same level of situational awareness, and could make itself a much more expensive system. The latter may also have a higher technical risk in terms of being able to produce a sufficiently intelligent vehicle.
Technology Readiness Levels
For wire-line technologies to support the Searcher, a number of options are currently at TRL 6. Near-term wireless solutions for Searcher and Donkey are problematic. Network connectivity could easily be lost due to non-line-of-sight (NLOS) interference caused by terrain or obstacles (e.g., thick building wall). Directional communications systems using electronically steerable array antennas currently exist at TRL levels ranging from 2 to 4. Anti-jam and LPI/ LPD communications systems with very wide spreading exist in the UWB and a C-band and above with TRL levels between 2 and 4. A number of prototype systems have been built up that have the potential to provide dynamic ad hoc
networking for tactical users. Most of these systems exist only at the sub-network level, and some have achieved TRL levels of 4 and possibly 5; however, new versions of these sub-networks may be needed to support the anti-jam LPI/ LPD waveforms necessary for UGV.
At the network level ad hoc technologies being developed under the CECOM MOSAIC program will be at TRL level 6 by 2004. The Air Force Multi-Sensor Command and Control Constellation (MC2C) program and the ACN (assign commercial network) program also seek to develop ad hoc networking technologies. Extensions to these technologies will probably be necessary to support UGV missions. Network security technologies are perhaps the furthest behind. While technologies have been developed and fielded for the Internet (TRL 6) these technologies are generally insufficient to support the requirements of the tactical military user of a UGV. Systems solutions that would provide multiple independent levels of security (MILS) data partitioning on a need-to-know basis across an entire network, authentication, key distribution, and intrusion detection and protection are currently largely just concepts and disjointed technologies at about TRL 2.
Capability Gaps
A number of gaps persist in the communications technology necessary to support the four example missions (DDR&E, 2002). These gaps exist in the areas of dynamic networking, security, LPI/LPD communications, and high-rate anti-jam communications. Specifically, technologies must be developed that will provide:
-
Integration of all data over all channels
-
Increased mobility, survivability, and flexibility
-
Assured delivery of information from anywhere to everywhere
-
Reduced logistics and manpower
-
Unimpeded warfighter access to global information when and where needed
-
Attainment of a seamless, integrated, strategic worldwide communications network to include joint, combined, and commercial, with interface to tactical communications systems
-
Automated, self-healing, global network management
-
Higher data rate—more bits per hertz.
Communications needs must also consider threat capabilities. The DARPA program manager (PM) for FCS communications is addressing this issue. For example, given the threat’s capability to monitor and jam RF transmissions, the PM is assessing such features as directional antennas, burst transmissions, advanced frequency hopping, and frequency spectrum management (personal communication between James Freebersyser, DARPA/Advanced Technology Office, and Al Sciaretta, committee member, October 11, 2001).
Security issues that must be addressed include the need for a secure universal method of authenticating users, partitioning data, distributing keys, protection against intrusion, and detection of intrusion.
A robot without communications is a lost asset. A systems integration approach should consider losses of network connectivity due to terrain or feature (e.g., thick wall) masking or other associated problems. Information technology solutions should consider redundancy, relays, and changes in frequency, even if it means degradation in bandwidth. Another approach is the use of behavior adaptation design considerations, which could include tactical movement to positions to restore communications or dead-reckoning movements until communications are reestablished.
Feasibility and Risks
The four areas of highest risk for communications are these:
-
Prevention of jamming or intercept. Because UGVs may need to be controlled remotely, jamming of control signals to UGVs could render them useless. Intercept of required transmissions could make the system vulnerable to easy detection and destruction.
-
Security. Security attacks on a dispersed unmanned system could include denial of service, compromising of classified high-value tactical information, corruption of information, and, in the most unlikely but most dangerous case, usurpation of the system.
-
Mobility management. This involves the protocols necessary to be able to detect changes in network topology and reroute traffic. It also includes the tactical deployment necessary to ensure that there will always be network participants on station to provide relay when needed.
-
Compatibility. Because efforts are ongoing by many different companies involved in many different programs, it is important that these disparate endeavors be based on a common vision and conform as much as possible to common interface standards.
The foregoing discussion provides the basis for the answer to Task Statement Question 4.b as it pertains to communications. See Box 5-3.
Impact on Logistics
The impact that the communications system will have on UGV logistics will depend upon the specific UGV mission. With development of the proper technologies, however, there is no reason that the communications system has to represent a major portion of the overall UGV logistical cost.
For the Searcher mission, communication will be primarily between one Searcher and one controller, who is located relatively near the Searcher (within 1 km). Logisti-
|
BOX 5-3 Task Statement Question 4.b Communications Question: What are the salient uncertainties for the other main technology components of the UGV technology program (e.g., adaptive tactical behaviors, human–system interfaces, mobility, communications)? Answer: There is significant overlap with the uncertainties that apply to communications for manned combat systems, but the salient uncertainties in communications for UGVs are much more critical. These include prevention of jamming or intercept, security, and compatibility. Security attacks on dispersed unmanned systems could include denial of service, compromise of classified high-value tactical information, corruption of information, and in the extreme, usurpation of the system. Communications for mobility management, perhaps of increasing importance to network-centric operations, must be able to ensure that there will always be network participants on station to provide relay when needed. The efforts of disparate endeavors in communications for both manned and unmanned systems must be based on a common vision and conform as much as possible to common interface standards. |
cally, coordination between the Searcher and the controller and generation and loading of cryptographic keys have to be locally coordinated only locally. Therefore, the communications system would not be expected to add significantly to UGV logistics.
For the Donkey, keys and authorization will have to be coordinated between all users who might need to communicate with the Donkey. This will be necessary to prevent unauthorized users from stealing, destroying, or diverting supplies that might be carried by the Donkey. Dynamic ad hoc networking and ad hoc cryptographic key distribution will be very important technologies to prevent the logistics for the Donkey’s communications system from becoming a significant contributor to system operational cost.
For the Wingman as for the Searcher, the communication system is primarily between one Wingman and an associated controlling unit. As in the case of the Searcher the coordination of the communications system, including authorization, keys, and networking, can be performed locally. If information must be shared between a number of Wingman UGVs or between the larger tactical network and the Wingman, then the Wingman’s communications system will require dynamic ad hoc networking and ad hoc cryptographic key distribution similar to the Donkey’s.
Because of the rate of change in connectivities and individual links and because of the potential need to share information with other systems operating in the area, the Hunter-Killer will almost certainly require dynamic ad hoc network and ad hoc cryptographic key distribution as described. Without these capabilities, the logistics required to design the networks and to assign and update keys could be so severe that the system would be impractical.
Recommended Areas of R&D
Research and development is necessary to fill the gaps in three areas: anti-jam LPI/LPD physical transmission waveform technologies, dynamic ad hoc networking for the tactical environment, and network security.
Anti-Jam LPI/LPD Physical Transmission Waveforms Technologies
Research and development is necessary along a number of fronts. Directionality shows significant promise in being able to supply covert robust communications at high data rates. Technologies need to be developed to control and steer directional communications in a mobile tactical environment. Improvements in electronically steerable antenna technology are necessary to facilitate directional communications in mobile environments. In addition to directionality, anti-jam and LPI/LPD performance can be improved by increasing the spreading factor of the transmission. Research and development is required for systems with very high degrees of spreading. These systems may include UWB systems or systems centered at very high frequencies, where signals can more easily be spread over 1 GHz or more.
Dynamic Ad Hoc Networking Technologies for the Tactical Environment
As data links proliferate in a mechanized UGV environment it will be more and more important that planning and logistics to support these data links be kept to a minimum. Traditional data links that require special data loads and significant network planning will not be possible in a fluid tactical environment that may contain thousands of nodes using several different physical waveforms. Dynamic ad hoc networking research and development is required at two different levels. First, research and development is necessary to develop and mature approaches to dynamic ad hoc networking at the sub-network level among network nodes that are using the same physical waveform. Second, research and development is necessary to develop and mature approaches to dynamic ad hoc networking at the network level, which will allow data to be seamlessly routed between sub-networks that may be using widely different physical waveforms.
Network Security
As data communications become more widespread and more tightly integrated into the tactical environment, protec-
tion of those communications from compromise or corruption is essential. Three areas of research are necessary in network security. First, we must develop technologies to allow networked data to be partitioned based on MILS so that information can freely flow through the network protected on a need-to-know basis. The second area for research and development is to develop a system to detect and protect against intrusion on the network. The third technology that must be developed to support a proliferation of communications in the UGV tactical environment encompasses secure methods for authenticating users within the network and for distributing appropriate keys. This third technology is essential to prevent the proliferation of communications nodes from overwhelming the logistical task of generating and distributing cryptographic keys.
POWER/ENERGY
This section defines the power/energy technology area as it relates to UGV systems. It assesses the state of the art in relevant technologies, estimates technology readiness levels, and identifies salient uncertainties.
Definition and Constraints
The energy source and the rate at which it can be utilized are key to robotic vehicles operating in the battlefield. At present, there are several options for energy sources, depending on the application. For small units the energy source can be a battery, rechargeable and nonrechargeable. For larger units the energy train can be fueled, allowing for motor-generator or hybrid-electric systems. The selection of the appropriate technology for use in any given robotic application must take into account all of the relevant factors that could influence mission success. These factors must be considered early in the development cycle.
The power train for robotic vehicles must support mobility, housekeeping, and mission package energy demands. The four example concepts, Searcher, Donkey, Wingman, and Hunter-Killer, can all be powered with existing technologies at some level. The difficulty comes when long, energetically demanding missions are required. For example, the battery technology to allow Searcher to go 1.5 km over modestly difficult terrain, perform a mission, and return to base would require more than 1 kWh of electrical energy. A rechargeable battery capable of delivering this amount of energy would be several kilograms in mass, leaving little room for any payload; therefore, it is imperative that small hybrid systems be available for Searcher to perform over the extended-duration mission envelope postulated. For Donkey, Wingman, and Hunter-Killer there are vehicle prototypes, both hybrid electrical and conventional diesel, that would suffice for many missions. If a stealth mode is required for long mission times, major developments in the power train will be necessary.
Mobility and Housekeeping
Depending on the mass, the power train may have to supply as much as 200 hp (~160 kW) to the drive mechanism for maximum speed and mobility. In addition, the onboard electronics (e.g., computer, communications) and sensor suites will require power/energy when in full-up operation. This could be reduced by half or less in quiescent or standby modes.
Mission Package
The UGV has two separate but integrated parts. The mobility package, which is the basic robot platform with the ability to navigate, to sense the environment, and so on, and the mission package, which must provide the mission function capabilities, such as weapons, logistics carrier, or reconnaissance scout hardware and software. Each mission package will have energy requirements of its own ranging from a few watts for long periods to kilowatts for short periods of time.
The most obvious factors impacting the energy supply are mission environment, mission time, vehicle mass, signature, cost, logistics support, size, and efficiency. These factors are not independent and they may be more severe and mission limiting for small robotic vehicles with the energy supplies that make up most of the mass and volume of the system.
The mission environment is taken to mean the local environment associated with any place in the world the military will conduct operations. Given that definition, the energy system must perform over a temperature range from approximately –65°F to well over 100°F in the desert. Further, sand, dust, salt fog and spray, and the possibility of chemical and biological environments are factors that could be superimposed on local environmental conditions.
Mission time can vary from days on station with little demand for energy for motive purposes or it can be full-up mobility and sensing at high rates of speed. Obviously the mission time is a strong function of the size, weight, and terrain through which the UGV is to operate; however, it is totally determined by the size of the energy store available for the vehicle. Due to the variable demand for energy it is better to express mission time in terms of kilowatt-hours needed for the mission. The mission time is also influenced by stealth considerations and the primary energy source available. Very probably stealth considerations will not be the same throughout a particular mission, allowing hybrid systems to be used when the secondary storage unit provides the energy for the stealth portion of the mission.
In general, consistent with the total energy requirement, weight must be minimized. The more mass devoted to energy the less there will be for payload. The mass factor is determined by mission profile, demand for stealth, and the energy demand for the payload. The mass factor is influ-
enced by power requirements in terms of peak and continuous demands and by the mission duration in so far as it demands refueling.
Power/Energy Signatures
For survivability, robots in a combat mode must have minimal signature. The most obvious signatures are acoustic, electromagnetic, infrared, and visual. Acoustic noise generated by the power train can be detected by ear or by frequency-selective, amplified detectors specifically designed to receive particular frequencies that are characteristic of a particular device. This imposes the severe constraint, for stealth operations of having to mimic the natural background in any operation that demands mobility or trying to totally suppress any acoustic signature. Susceptibility to detection also depends on local environmental conditions and can vary by orders of magnitude depending on such factors as winds and weather.
Electromagnetic signature is more difficult to suppress. The robot will have to be in communication either continuously or periodically, depending on the degree of independence needed to carry out its mission. This signature may be minimized by using spread spectrum and/or pulsed mode to minimize the time necessary for autolocation by the enemy. In addition, many of the electrical systems generate noise that can be readily received and used as a homing signal. Motor noises and the low frequencies associated with conversion processes are examples.
Infrared signature is one of the most difficult to suppress. Fueled systems utilize the heat of combustion to drive such devices as motors in a well-defined thermodynamic cycle. The efficiency is limited to the Carnot cycle, and hence most of the heat of combustion must be ejected into the local environment. Present IR devices are sufficiently sensitive to detect objects that are less than a degree above or below ambient conditions. These signatures will be extremely difficult to suppress and will have great bearing on the survivability of UGV systems in the field. The general approach to date is to try to mimic the background environmental conditions.
Visual signature is a continual threat. It can be enhanced using electronic devices but is mitigated using typical camouflage color schemes and in the future with adapted camouflage that can be changed continuously to blend with the local environment.
Impact on Logistics
Since support personnel make up most of the armed forces, it is imperative that we seek to minimize the logistics requirements for the power train of UGVs. It may not be practical to eliminate one combat position and require three support personnel to service the robotic vehicle that replaced him. Within that context there would be requirements for training, spare parts, manuals, and special tools. A key factor is the use of any special fuel. As robotic vehicles mature, it will be imperative that the vehicle has the capability to refuel itself from prepositioned fuel or fuel that is air dropped in the vicinity. If it has smaller specialty robotic elements, it must be capable of fueling and programming them for specific tasks. At present, the military is moving to one battlefield fuel that limits many of the options for fueling UGVs in the near future and simultaneously eliminates several promising options.
Above all else, the energy source and its power train must be reliable, easily maintained, and available when needed. These factors are all interrelated with the logistical support and signature management. For high reliability, the system should be as simple as possible and be based on proven technology, preferably something with an enormous legacy within the civil or military sector. Redundancy in the items that represent single point failures will be necessary to ensure reliability in the field. For extended operation in the field, such items as spare parts and filters should be readily changeable; in some instances the UGV might be able to accomplish this task itself from prepositioned supplies or from a tactical logistics robot that could bring supplies when requested. In the absence of specific requirements there are no current values for reliability, maintainability, and availability.
To reduce logistics the volume and mass of the vehicle must be compatible with mission requirements and be locatable on the platform in a way that will provide an optimal center of gravity. Any given UGV will have volumetric constraints in addition to mass constraints that will need to be optimized.
The unmanned vehicles envisioned for the military run the gamut from microvehicles to miniature UGVs with short-range and highly specialized capabilities (Searcher) to multiton vehicles that can be used for convoy, tactical resupply, scout, weapons platforms, and resupply missions. In between are vehicles to serve as weapons platforms (Hunter-Killer), reconnaissance (Wingman), and rucksack-carrier (Donkey). The energy/power technologies appropriate for each mission must be formatted for that user. On the low end of the size range a small hybrid system or highly energetic primary batteries, even though costly, may be a solution; at the high end of the size range standard motor-generator technologies with the addition of hybrid concepts are applicable.
State of the Art
NRC (1997) contains a comprehensive description of the state of the art in advanced battery and fuel cell technology, both in the military and civil sectors. Table 5-3 shows various energy systems and conversion techniques and represents a concise statement of the state of the art in terms of technology readiness levels. Also included in Table 5-3 are estimates of the potential for improvements for each power
TABLE 5-3 Summary of Power/Energy Systems
|
Power System |
State of the Art |
Potential for Improvement |
Key Issues |
Scaling Laws |
Potential for Unmanned Ground Vehicles |
Hostile Signature |
Suppression Potential |
Fuel |
Autonomy Time |
|
Primary battery |
Mature TRL 8-9 |
Moderate |
Energy density Safety Power density Environmental impact, cost |
Known |
Existing inventory item Applicable to small UGVs Less weight Disposability |
Minimal |
Excellent |
None |
Hours/days |
|
Secondary battery |
Mature TRL 8-9 |
Moderate |
Energy density Cycle life Power density |
Large industry investment Essential in hybrid power systems |
Known |
Minimal |
Excellent |
None |
Hours |
|
Fuel cells (hydrogen) |
Exploratory development TRL 6-8 |
Excellent |
Fuel reformers Water management Safety |
Known |
New capability, large industry interest in automotive applications Less weight Fuel storage problems |
Thermal |
Excellent |
Hydrogen |
Days/weeks |
|
Fuel cells (methanol) |
Emerging TRL 4-6 |
Excellent |
Fuel and fuel crossover Catalyst |
Uncertain |
New capability Requires new fuel |
Thermal |
Excellent |
Methanol |
Days/weeks |
|
Nuclear isotope |
Limited TRL 9 for space applications |
Excellent |
Safety Environmental impact Cost Public acceptance |
Known |
New capability, large NASA and DOE investment, fueled for lifetime of vehicle |
Thermal Nuclear |
Moderate |
Special |
Month/years |
|
Internal combustion |
Some versions mature TRL 9 for most applications |
Moderate to excellent |
Fuels Vibrations Life |
Uncertain |
Currently in extensive use Critical to hybrid power systems |
Thermal Acoustic |
Moderate |
Multifuel (Some special) |
Days/weeks |
|
External combustion |
Emerging, some mature versions TRL 4 for large sizes |
Excellent |
Low specific power |
Known |
New stealth capability Immature at high power levels, heavy |
Thermal |
Moderate |
Multifuel |
Days/weeks |
|
SOURCE: Adapted from NRC (1997). |
|||||||||
system technology with reference to its potential for UGV applications.
Hybrid Power/Energy Trains
In most cases the power train of choice should be one consisting of a fueled system that provides the primary energy store and an intermediate store that for stealth reasons will probably need to be a rechargeable battery. A small hybrid energy system would be sufficient for the Searcher, given the mission parameters postulated. Current development efforts focus on hybrid systems coupled with a secondary battery in the configuration shown in Figure 5-2.
The mission energy supply is contained within the fuel carried on the vehicle. In the near term a motor generator will be used to convert the energy to electrical energy usable by the UGV. In the far term, reformed logistic fuel coupled with a fuel cell may provide the initial electrical energy. Part of the energy is stored in the intermediate storage unit, usually a high-specific-energy, high-specific-power rechargeable battery. This unit is sized to give the UGV a predetermined amount of energy that will maintain power to the mission package and provide stealthy movement for some tactically significant time.
The controls package will have to be “intelligent” and may be part of the overall computational capability of the UGV. Clearly it must interface with whatever decision-making process determines the mode in which the vehicle as a whole is to operate. When the intermediate store has been expended to a point where it is necessary to recharge, the unit must determine if it is in danger and weigh the possibility of detection and destruction against running out of immediate energy and becoming disabled. The intermediate store and the prime energy store would be capable of operating simultaneously to give the UGV a sprint capability in an emergency. In a nonstealth mode, the motor gen-
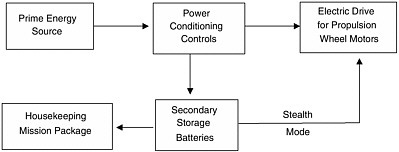
FIGURE 5-2 Schematic of typical hybrid electric power train for UGVs.
erator will provide energy for housekeeping and the mission packages while keeping the intermediate store fully charged. It is possible to extend the stealth mode to operation with the motor engaged. Tuned mufflers and other techniques can reduce motor noise to levels that cannot be detected beyond a few feet. This stealth technique only applies to the acoustic signature and is achieved at the expense of efficiency.
In the far term fuel cells offer the possibility of better fuel economy and inherently more stealthy operation. Due to the dynamics of reforming battlefield fuels and the operation of fuel cells in general, it will still be necessary to retain the battery-driven intermediate storage unit. The critical issue driving application of fuel cells in military systems is the problem of hydrogen generation and storage. Storage in hydrides is at most a few percent efficient by weight.
Reforming of battlefield fuels is hampered by the sulfur content of the fuels. Recent progress in microchannel reformers indicates that small efficient, poison-tolerant systems can be built that will enable the use of battlefield fuels in reformers for fuel cells (Irving et al., 2001).
For larger systems, Figure 5-3 shows approximate system mass for a hybrid electric power train as a function of mission duration measured in terms of kilowatt hours of energy. The hybrid systems chosen are 50 hp and 200 hp (0.76 kW/hp) with a motor generator with a high-specific-power, high-specific-energy intermediate storage battery for stealth mode, housekeeping, and mission package power for the near term, and a reformer fuel cell, intermediate storage unit that can be developed in the far term.
For small UGVs, such as those needed for tunnel investigation and building search and clearing, the energy requirements are much less than those for the large units described in Figure 5-3. NRC (1997) found that small hybrid systems would be the choice for dismounted soldier systems whose mission-time requirements exceeded a certain number of kWh. Figure 5-4 extrapolates this data from 50-W soldier systems to the 500-W systems more typical of a tactical mobile robot, such as the Searcher UGV. In Figure 5-4 a range of battery types are graphed along with two hybrid concepts. Hybrid devices excel above mission times of 4 kWh for all of the standard battery types investigated. Only the zinc-air system appears to be competitive on the basis of specific energy out to 8 kWh. Zinc-air in its current embodiment is, however, specific power limited, and some research would be needed to move it into a competitive position in this regime. Mission times in excess of approximately 8 kWh are clearly in the domain of fueled systems.
Technology Readiness
Miniature hybrid energy systems are estimated at TRL 4 but should achieve TRL 6 by 2006 if adequately funded to achieve Land Warrior program objectives (for soldier-portable power sources for individual soldier electronics). The high-specific-energy rechargeable battery is at TRL 4 and will not achieve TRL 6 until 2009. Compact logistic fuel reformers are at TRL 3 to 4.
Capability Gaps and Recommended R&D
The specific energy of rechargeable batteries is in some degree dependent on hazards to the humans who use them and their potential for abuse. For robotics, referring to Figures 5-3 and 5-4, improving the specific energy of the rechargeable battery by a factor of two would result in significant mass savings or more stealth time for the same mass. Similarly, fuel cells will not see widespread battlefield use until there is a compact, reliable fuel reformer capable of utilizing battlefield fuels. Both of these are high-impact areas and will need further work in order to extend mission times to acceptable levels.
Small robots are severely limited by the energy store. Current robots must rely on low-specific-energy recharge-
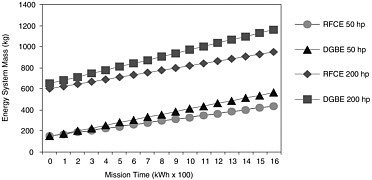
FIGURE 5-3 System mass as a function of mission energy requirements. RFCE = reformer fuel cell electric; DGBE = diesel generation battery electric + 20 min battery at 1/2 power. SOURCE: Bill (2001); DOE (1998b).
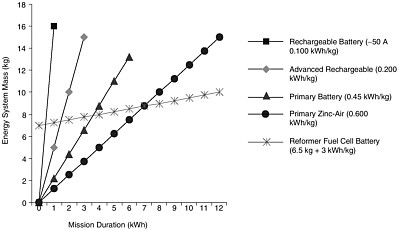
FIGURE 5-4 Hybrid UGV 50-watt to 500-watt systems. SOURCE: Data from NRC (1997).
able batteries or costly primary batteries that only extend the range by factors of two. Hybrid systems for small robots are a prime candidate for further investment.
The foregoing discussion provides the basis for the answer to Task Statement Question 4.b as it pertains to power/ energy. See Box 5-4.
HEALTH MAINTENANCE
This section assesses health maintenance technologies for self-monitoring, diagnostics, and remediation of UGVs. It discusses the state of the art, technology readiness, and capability gaps.
|
BOX 5-4 Task Statement Question 4.b Power/Energy Question: What are the salient uncertainties for the other main technology components of the UGV technology program (e.g., adaptive tactical behaviors, human–system interfaces, mobility, communications)? Answer: Salient uncertainties for power/energy technology developments cannot be determined until one specifies a mission time in kWh. Short duration, low-mission-energy requirements can be met now. If the goal is to enable extended duration, high-energy UGV missions, the following issues must be addressed: catalysts for reforming fuel, thermal rejection processes, stealth, and energy storage and replenishment. These are all areas that are likely to be required for FCS systems. |
Definition
Health maintenance has two distinct flavors. One is making the robot more physically robust; the other is detecting, diagnosing, and recovering from component failures (or from degradations in performance that may lead to mission failures). Of the two, making the robot more physically robust is well understood.
Such failures as engine overheating, loss of communications, or flat tires have solutions that are not unique to unmanned systems. UGV health maintenance technologies resolve aspects of failures that are either unique to UGVs or require machine awareness. This specifically includes technologies targeted at preventing or mitigating failures of sensors or electronics for robot vehicles.
UGVs operating as part of the FCS must be exceptionally robust for many reasons. They are likely to be limited in number and there may not be many backup or replacement vehicles. In addition, the short duration of the mission may not permit a replacement; consider a UGV that takes 8 hours to position itself, fails, then another 8 hours is spent positioning a replacement for a total of 16 hours of unavailable asset at a desired location.
Vehicle health monitoring and maintenance are intended to ensure that the robot performs its current set of tasks reliably and within acceptable parameters, as well as to project those capacities for the future (e.g., a robot just a few hours away from needing an overhaul should not be tasked for a new mission). Subtle sensor failures could lead to false positives or false negatives on targets, leading to an overall mission failure without the operators ever suspecting a fault. Likewise, UGVs should have monitoring systems that aid the maintenance technicians and reduce the time out of service.
Vehicle health monitoring is expected to be accomplished using machine intelligence for several reasons. If a vehicle cannot self-detect problems, it may actually make them worse while waiting for a human operator to notice the dysfunction, for example, spinning itself deeper into the mud, oblivious to being stuck. The number of sensors and the impact on performance may be too subtle for a human operator to discern and respond to in a timely fashion. The time lag may be too large for critical situations to wait for human involvement. For example, suppose a navigational sensor is damaged by a sniper, the robot cannot just sit there and wait for the human to notice and take charge. Instead, it should either swap to a safety behavior using another sensor or continue with its current behavior using either a physically or logically redundant sensor.
Health monitoring and maintenance are similar to fault tolerance. Fault tolerance connotes the ability of a system to compensate for failure conditions. Many engineers now refer to fault-tolerant methods with the acronym “FDIR” (fault detection, identification, and recovery) to emphasize the steps involved in accomplishing fault tolerance. However, both fault tolerance and FDIR may not adequately capture the breadth of issues in vehicle health monitoring and maintenance or the source of errors. In the manufacturing and aerospace domains failures are synonymous with hardware, obscuring the role of control and mission-planning software in intelligent vehicles. The fault-tolerance community is concerned with what may be termed catastrophic failures, complete failure of a critical component. This concern ignores the potential impact on performance due to gradual degradations in such components as actuators and sensors over time or transient failures. It also overlooks the contribution of the environment to the dysfunction of a component (e.g., mud causing wheels to slip, fog covering a sensor lens). In intelligent vehicles each of the local components can be behaving correctly yet still show a failed or incorrect performance due to errors in the mission plan (e.g., instructing the robot to do the wrong thing at the wrong time).
The breadth of issues involved in vehicle health monitoring and maintenance include:
-
Identification of both degradation and catastrophic failure of components, either singly or cumulatively, that result (or will soon result) in an unacceptable level of task performance.
-
Identification of the cause with sufficient granularity as to effect a recovery (e.g., the vehicle does not need to know what component on the camera failed, just that the camera cannot be used). As noted in Murphy and Hershberger (1999) and Basu and Paramasivam (2000), faults originating from one source may appear to stem from another, such as a software failure may appear to be a hardware failure.
-
Identification and implementation of a recovery procedure to restore performance, either by adapting or recalibrating processes, pre-empting and reallocating hardware and/or software, changing to different behaviors, or replanning.
State of the Art
Fault tolerance and machine health have long been a focus area in manufacturing. Manufacturing facilities often use statistical process control to track deviations in the output quality of machines, adapt the production process, and determine when to pull a machine for maintenance. Statistical process control (SPC) is not well suited for industrial robots or robot vehicles because it only points to a defective machine, not what makes the machine produce defective parts. There is also usually a lag time in SPC before the problem is discovered. Real-time fault tolerance is needed for vehicle systems. It is commonplace, in computing, where critical computers often work in mirrored pairs so that if one fails the other takes over; this explicit redundancy is undesirable with limited numbers of expensive vehicles.
The need for fault tolerance in robot systems has been noted since, at least the mid-1980s (Moore, 1985). While the need for fault tolerance has been discussed for unmanned underwater vehicles (UUVs) (Rae and Dunn, 1994) and UGVs (Yan et al., 2000), the UAV community appears to have a lead in actual implementation of such systems. This lead may stem from its aerospace roots, where flight critical systems are explicitly designed for fault tolerance with triple physical redundancy on many components. The UAV community has a decided advantage over UGVs; UGVs must operate in much more complex and adversarial terrain and carry far more sensing software.
In general, fault-tolerant methods for mobile robots in the literature concentrate on detection and diagnosis and assume that recovery is straightforward. The majority of work focuses on catastrophic failures, ignoring normal degradations with only a few exceptions (Murphy and Hershberger, 1999; Liu, 2001). Some recent efforts claim to be fault tolerant; they bypass the FDIR cycle by simply imposing limits or thresholds on what is an acceptable signal from an actuator or sensor (Schreiner, 2001; Okina et al., 2000). Clearly these approaches are too limited for FCS-like domains.
The dominant methods for fault detection and diagnosis are offshoots of control theory or artificial intelligence research in diagnosis. The earliest work on robot diagnostics developed toolsets (Carnes and Misra, 1996) and expert systems and other interactive tools (Krishnamurthi and Phillips, 1992; Nikam and Hall, 1997), including ROBODOC (Patel and Kamrani, 1996). Model-based methods are popular (Jackson, 1997; Clements et al., 2000), particularly variants of Kalman filtering (Washington, 2000; Roumeliotis et al., 1998; Vos and Motazed, 1999). Actual demonstrations of model-based methods have been shown on ground robots for navigational errors in (Goel et al., 2000; Soika, 1997) and with the Bell Helicopter Eagle-Eye UAV (Rago et al., 1998).
Despite their popularity, model-based methods have many disadvantages. The models are difficult to construct and fall apart if the model is not correct and complete. Reasoning over the model is often computer and time intensive, preventing it from being used in real time (though ever increasing chip speeds may provide the ultimate solution). They tend to be monolithic in nature, though some systems explicitly reflect the hardware, software, environment, and planning errors by creating a hierarchy of layers (Visinsky et al., 1995). Murphy and Hershberger (1999) developed a system that relied on only partial causal models, avoiding these drawbacks, and demonstrated it on two different mobile robot systems. Other detection and diagnostic methods proposed for robot fault tolerance include the use of rules (Djath et al., 2000), automata theory (Perraju et al., 1996), and fault trees (Madden and Nolan, 1999).
Of the fault-tolerant activities, detection is possibly the most commonly targeted topic. Techniques for the detection of hardware and software failures include learning with neural-networks, UUVs (Deuker et al., 1998), pattern matching in complex streams of information (Oates and Cohen, 1996), and using kinematic and dynamic models of wheels (Dixon et al., 2001) besides the more traditional approach of hardcoding monitoring routines. Sheldon et al. (1993) offer a method of selecting the best software for a simplified UGV. Techniques for the detection of navigational errors, particularly not reaching expected locations within expected time or other modeling constraints, have been studied by Bikfalvi and Lorant (1999) and Stuck (1995). Detection of planning errors or failures has been demonstrated for space vehicles (Rasmussen, 2001; Aghabarari and Varney, 1995) and in mobile robots (Lamine and Kabanza, 2000; Bergeon et al., 1994; Lam et al., 1989). The detection of adverse changes in the environment has not been considered, except cursorily by Murphy and Hershberger (1999).
Unfortunately, each of the above methods is vulnerable to the same drawbacks. Each ignores transient errors (e.g., loose connection jolted off, then back on). Multiple simultaneous failures are ignored or assumed to be statistically independent, but battle damage is not statistically independent; for example, all the components on one side of the vehicle may be affected by an impact.
Isolated diagnostic methods include the use of logics from AI (Portinale and Torasso, 1999), while explorations in recovery appear limited to the use of genetic algorithms (Baydar and Saitou, 2001). The research in these areas is theoretical and has not been applied outside of simulation.
There is no reason to suspect a breakthrough in fault tolerance from foreign technology. Academic research seems to be split between Europe and the United States, with some participation by the Japanese. There seems to be no clear lead, and it is expected that the relative levels of academic research represent the relative levels of implementation in industry.
Current Army Capabilities
The current state of the art in academia is quite limited in regards to vehicle health monitoring and maintenance. Current capabilities do not include even the basic interactive
expert systems available since the mid-1990s. This is not surprising given the emphasis on component technologies and demonstrations in the Army UGV projects. Fault tolerance and system health are currently not active considerations in the Army UGV program.
Technology Readiness
The current level of readiness for UGV health maintenance and health-monitoring technologies is at TRL 0. Much of this work is theoretical and may not be readily transferred to Army systems. Assuming that data on failure modes is available, it is reasonable to expect that within 5 years technology should be able to provide an interactive expert system that will at least aid a teleoperator in diagnosis.
Although not part of health maintenance technology per se, physical reliability and maintenance characteristics for the Searcher and Donkey examples are at TRL 5, with TRL 6 achievable within the near term. Cooperative diagnostics and monitoring to link with the tactical skill of calling for help has not been demonstrated for robotic platforms and is estimated at TRL 3 or less.
If algorithms for self-diagnostics could be adapted from those for existing platforms, this technology could be at TRL 3. Other platform-dependent technologies, such as intentional design for combat survivability as would be required for the Wingman and Hunter-Killer, is at TRL 1 or less. Similarly, self-repair technologies for Hunter-Killer are at TRL 1.
Capability Gaps
In the long term, work in reconfigurable robots is expected to be of use in having robots identify damaged components and adapt accordingly. An often overlooked aspect of health maintenance is how the robot responds to handling by unauthorized personnel. In this case it is expected that the robots will have non-lethal responses to unauthorized handling.
An important aspect of individual vehicle health monitoring and maintenance is the application of what is learned about one vehicle to other vehicles. An FCS system that could share, propagate, and exploit information gained from one vehicle to another would be much more useful. Imagine a vehicle having a problem with a FLIR sensor due to unexpected interaction of fog and foliage. Once identified, all vehicles could be alerted to this possible failure mode and proactively attempt to recognize it before the FLIR reported suspect readings that might lead to a wrong decision or take valuable time and bandwidth to resolve.
Fault detection, diagnosis, and recovery is generally acknowledged to be a difficult problem, especially in systems without the triple redundancy and a relatively static environment found in aerial vehicles. The first level of response, required by all four of the example systems, will be for the robot to help monitor itself so that the operator can respond appropriately and timely. The levels escalate from there.
Higher-order health maintenance capabilities, such as self-diagnostics and self-repair, depend to a great degree upon advances in similar technologies for manned systems.
Salient Uncertainties
One fortunate aspect of vehicle health monitoring and maintenance is that it does not have to be perfect or autonomous to improve performance. Any system that can reduce the number of errors or the time it takes to discover that an error is occurring is a win, even if the final diagnosis and recovery plan are generated manually. The only other options are to have a human constantly scrutinize the vehicle for signs of failures (a poor use of manpower and questionable as to the amount of attention that can be maintained) or to just assume that everything is working correctly.
The literature offers promising avenues to explore in health monitoring but there is no clear solution. One interpretation is that development of a health-monitoring system is not feasible. The interpretation we chose is that health monitoring for UGVs is probably more difficult than for manufacturing or aerospace, since UGV military operations represent a more demanding domain for real-time fault tolerance than any of the test domains reported in the literature, but it can be done if the demand for it is made clear. The amount of research spent on fault tolerance for mobile robot systems is almost negligible compared with navigation, path planning, localization, and mapping. Likewise, vehicle platforms remain sensor impoverished, focusing only on the ideal sensor needed to navigate, not on adding expensive physical redundancy or identifying logical redundancy, or adding internal sensing and processing algorithms.
The real question of feasibility depends on the FCS deployment profile: a trade-off between the tempo of operations and the vehicle redundancy. If extra vehicles are available to be predeployed to rapidly replace a failed robot, then allowing a UGV to die in place may be acceptable. Note that this only eliminates the diagnostic and recovery functions of fault tolerance; the robot or operator still must be able to detect failures. If the number of vehicles is limited, every asset must remain as functional as possible.
The foregoing discussion provides the basis for the answer to Task Statement Question 4.b as it pertains to UGV health maintenance. See Box 5-5.
Recommended Research and Development
In order to have fault-tolerant vehicles, the Army has to incorporate the expectation of fault tolerance into its development programs. The Army may be able to use “black box” technologies to record what prototypical robots are sensing and doing; this is critical to begin the rigorous data collection needed to serve as the basis for any health-monitoring system or even what it means to be survivable. Steps that should be taken now are as follows:
|
BOX 5-5 Task Statement Question 4.b Health Maintenance Question: What are the salient uncertainties for the other main technology components of the UGV technology program (e.g., adaptive tactical behaviors, human–system interfaces, mobility, communications)? Answer: Toolsets consisting of sensors, diagnostics, and recovery methods will be based on FCS operational requirements. Coming up with a calculus of diagnosis and recovery similar to the triple-redundancy development systems and design logic used for NASA systems will be a major challenge. Like human–robot interaction technologies, health maintenance developments will require extensive experimentation and testing. |
-
Begin a program of rigorous data collection on failure modes in UGVs, including software and AI functions. The majority of approaches to FDIR require models and/or frequency of failure data; this data is usually collected from empirical studies, particularly in the presence of hard-to-model environmental effects. The data can be used by any probabilistic, model-based, or expert system FDIR scheme, and so a premature commitment to any particular approach is not required.
-
Develop a toolset of common sensors, diagnostics, and recovery methods.
-
Explore using fault-tolerant techniques developed for the aerospace community for ground vehicles.
-
Explore mechanisms for explicitly designing in physical and logical redundancy in mobility and sensing subsystems.
SUMMARY OF TECHNOLOGY READINESS
Table 5-4 summarizes the technology readiness assessments made in each of the preceding sections as relates to the example systems defined in Chapter 2. Technology developments in UGV supporting technology areas of power/ energy, communications, and health maintenance depend heavily on system-level requirements for UGVs that have not yet been defined. These may well prove to be pacing items for the overall FCS UGV system development program. This provides basis for the answer to Task Statement Question 3.b in Box 5-6.
Capability Gaps
The capability gaps discussed in the previous sections that must be filled by the Army to support development of the four example systems are summarized in Table 5-5. For each gap the committee estimated a degree of difficulty and risk (indicated by shading in Table 5-5) according to the following criteria:
-
Low difficulty/low risk—Single short-duration technological approach needed to be assured of a high probability of success
-
Medium difficulty/medium risk—Optimum technical approach not clearly defined; one or more technical approaches possible must be explored to be assured of a high probability of success
-
High difficulty/high risk—Multiple approaches possible with difficult engineering challenges; some basic research may be necessary to define an approach that will lead to a high probability of success.
Tables 5-4 and 5-5 provide the basis for answers to Task Statement Question 3.d. See Box 5-7.
|
BOX 5-6 Task Statement Question 3.b Question: Are all the necessary technical components of a UGV technology program identified and in place, or if not, what is missing? Answer: Missing technical components include supporting developments in human–robot interaction, power/energy, communications, and vehicle health maintenance that will depend heavily on system-level requirements. |
TABLE 5-4 Estimates for When TRL 6 Will Be Reached in UGV Supporting Technology Areas
|
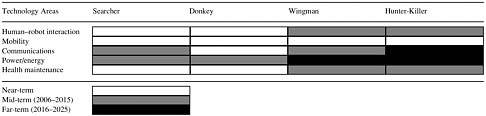 |
TABLE 5-5 Capability Gaps in Supporting Technology Areas
|
Degree of Difficulty/Risk |
|
|||
|
Low |
||||
|
Medium |
||||
|
High |
||||
|
|
Capability Gaps |
|||
|
Technology Areas |
Searcher |
Donkey |
Wingman |
Hunter-Killer |
|
Human–robot interaction (HRI) |
Telesystem HRI algorithms that support 1 operator per robot. |
Semiautonomous HRI algorithms that support 1 operator per 5 homogeneous robots. |
Natural user interfaces. |
Natural user interfaces. |
|
|
Multimodal interfaces (nlp, gesture). |
Natural user interfaces. |
Diagrammatic and multimodality interfaces. |
Methods for interacting and intervention under stress. |
|
|
Semiautonomous HRI algorithms that support multiple operators. |
Near-autonomous HRI algorithms that support multiple operators and robots. |
||
|
Mobility |
Ability to right itself in restrictive passages/areas. |
Platform capable of handling 40 km/h on smooth terrain with sensitive payload. |
Platform capable of handling 100 km/h on smooth terrain with sensitive payload. |
Heterogeneous marsupialism to transport specialized robots and sensors. |
|
|
Platform capable of handling 40 km/h on rough terrain with sensitive payload. |
Platform capable of handling 100 km/h on rough terrain with sensitive payload. |
Platform capable of handling 120 km/h. |
|
|
Communications |
High bandwidth for secure video; local to group. |
Low bandwidth for “breadcrumbs,” local to group. |
Medium bandwidth for mobile network, local to group. |
High bandwidth for secure and reliable network-centric communications. |
|
|
Wireless backup for line-of-sight communications. |
|
Large amounts of distributed information. |
|
|
Power/energy |
High energy density rechargeable battery. |
High energy density rechargeable battery. |
Highly efficient stealth energy system. |
Long standby (30 days). |
|
|
Small, hybrid energy system. |
|
Highly efficient stealth energy system. |
|
|
|
High-speed mobility enablers. |
|||
|
Health maintenance |
High physical reliability, low maintenance. |
High physical reliability, low maintenance. |
Design for combat survivability. |
Self-repair by reconfiguring components. |
|
|
Cooperative diagnostics for remote operator. |
Algorithms for self-diagnosis. |
Self-repair by self-reprogramming. |
|
|
Ability to know when to call for help. |
|
|||
|
BOX 5-7 Task Statement Question 3.d Supporting Technology Areas Question: What technology areas merit further investigation by the Army in the application of UGV technologies in 2015 or beyond? Answer: The committee postulated operational requirements for four example UGV systems and determined critical capability gaps in multiple UGV technology areas. Technology areas meriting further investigation by the Army are listed in Table 5-5. |






















