
3
Future Mars Exploration: The Rolling Wave
A 20-year hiatus in Mars exploration followed the 1976 Viking spacecraft landings on Mars. But since the Mars Pathfinder mission in 1996, NASA has pursued a Mars exploration strategy that entails new missions at every Mars launch opportunity—every 26 months. These opportunities have included both orbiter and lander missions with complementary capabilities. Orbiter missions provide global datasets and context, as well as communications for “direct contact” missions such as rovers. Landed missions provide detailed in situ measurements that can be related to the global perspective that the orbital missions provide. Current and upcoming Mars missions are shown in Figure 3.1 and Table 3.1.
Future Mars missions can be expected to identify and study regions on the planet that contain evidence for habitable environments, especially those that indicate the past or current presence of liquid water (MSPSG, 2004). Evidence for water on Mars is widespread (see Chapter 4). The 2005 Mars Reconnaissance Orbiter (MRO) will provide a large volume of new remote sensing data, including data from extreme close-up photography, imaging spectroscopy, and sounding radar. The 2007 Phoenix Mars Scout mission will explore a high-latitude landing site where near-surface water ice may be accessible, and the 2009 Mars Science Laboratory (MSL) will conduct detailed mobile in situ investigations that will assess the past habitability of a promising field site. Additional Mars Scout missions1 will be interspersed with program missions and can respond to emerging and focused scientific questions that arise over the course of NASA’s Mars exploration strategy. Planning is under way to select Scout missions in 2011, 2016, and 2020 in response to Announcements of Opportunities soliciting concepts for Scout missions. In the intervening launch opportunity years (2013, 2016, and 2018), program-directed missions (missions developed by NASA) including sample return, an astrobiology field laboratory,2 and a deep-drilling mission are under consideration (see Table 3.1).
Together, these planned missions represent an unprecedented systematic exploration of an alien world. Over time, missions will become increasingly ambitious in both technology and objectives at Mars. Adaptations in scientific goals and techniques, as well as in planetary protection policies and practices, will need to be evaluated and implemented in a flexible manner in the midst of this rolling wave of exploration.
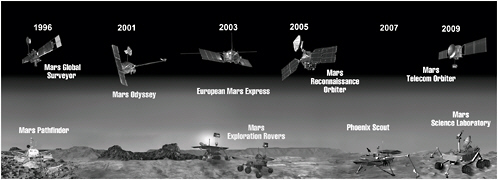
FIGURE 3.1 The suite of recently completed, current, and funded Mars missions planned for launch by the international community before the end of 2010. SOURCE: Presentation to the committee by James Garvin, then chief scientist of the Mars Program, NASA, February 26, 2004.
TABLE 3.1 Mars Exploration: Planned Missions and Year and Mission Concepts and Their Objectives
INCREASING COMPLEXITY, CAPABILITY, AND CREATIVITY
As the Mars Exploration Program unfolds, missions will take advantage of increasing complexity, capability, and creativity for exploring the planet. Future missions may rely on balloons, drills, and airplanes to tour and access the planet. For example, moles3 and drills are techniques for enhancing access to the martian subsurface. The European Space Agency’s Beagle II Lander was the first Mars mission that was to employ a mole; that device was designed to reach depths as great as 1.5 m beneath the surface.4
Because access to the subsurface is an important capability for conducting a number of high priority scientific and human exploration-related investigations (Beaty et al., 2001; Clifford et al., 2001; MEPAG, 2004), there is also considerable interest in, and active work on, the development of robotic drills capable of reaching depths of 2 to 100 m beneath the martian surface (Miller et al., 2004). Technologies capable of reaching depths of as much as several kilometers are also being considered (Blacic et al., 2000), motivated by the desire to reach any permanent reservoir of groundwater that might be present beneath the cryosphere (see Chapter 4). From an implementation perspective, the technical readiness level of current prototypes suggests that drilling investigations capable of reaching depths of up to ~25 m could be flown by 2020, while access to depths of 100 m or more may be possible by 2030.
Although access to depths of several kilometers may be decades away with the drilling technologies now envisioned, comparable depths may be reached in the permanent polar ice caps much sooner. For example, one concept to explore the polar subsurface incorporated a probe capable of melting its way through a few tens of meters of ice, with the resulting melt water freezing in its wake (Hecht and Saunders, 2003). Similar devices proposed for use in Earth’s Antarctic regions and on Europa are theoretically capable of reaching depths of many kilometers.
Future missions to the martian surface are also planned to have greater longevity and mobility. The Mars rovers Spirit and Opportunity rely on battery and solar power sources that were designed for 3-month operation, though their lifetime has proven to be much longer under martian conditions than anticipated, and both rovers were functioning more than 1 year after their landings. The 2009 Mars Science Laboratory, a mission designed to explore potential habitats, will use a radioactive thermal generator as a power source, giving the rover the capability to roam distances of 20 km and to visit multiple sites that may include diverse martian environments.
Mission concepts have also been proposed for conducting regional Mars exploration, through airborne devices. Balloons have been proposed to traverse large areas, borne by seasonal winds for durations of days to weeks, using either solar heating (in a summer polar region) or helium gas to maintain flotation. Reconnaissance of hundreds to thousands of square kilometers seems possible, as does vertical profiling of atmospheric properties. Mars airplanes using chemical propulsion or simply gliding in the atmosphere have also been proposed with similar capabilities, trading off reduced coverage for control of the specific surface areas to be investigated.
NASA’s strategy for exploring Mars is exciting. As planned, the Mars Exploration Program will search for and visit those regions that suggest the best case for harboring present or past life.5 Advanced technologies could enable touring and traversing the planet over diverse environments, including dry regions, icy areas, or even sites with permanent liquid water, should they exist. Mechanisms for accessing the subsurface and collecting samples could involve contact with martian regolith at depths that may have been protected from the harshness of the Mars surface and environment. The potential success of these missions in identifying habitats, locating past life, or even finding extant life could call for repeat visits by later probes to verify findings and conduct further scientific investigations. In light of the current plan for Mars exploration, as detailed in the Mars Exploration Strategy (MSPSG, 2004), the need for planetary protection practices to prevent the forward contamination of Mars is critical. Indeed, NASA’s solar system exploration roadmap identifies planetary protection technologies as important for the next decade of solar system exploration (NASA, 2003). A challenge, however, is how to integrate the new knowledge obtained from the ongoing series of Mars exploration missions into planetary protection policies and practices.
|
3 |
A mole is an autonomous device that is capable of entering the subsurface. |
|
4 |
See <www.beagle2.com/index.htm>. The Beagle II lander failed, however, and may have crashed. |
|
5 |
See MSPSG (2004), pp. 8-11. |
THE ROLLING WAVE
The Mars Exploration Program’s 26-month launch cycle is providing the planetary science community with a rolling wave of Mars missions, including broad international participation, that promises increasing levels of technological capability and scientific discovery at each new mission opportunity. This rolling-wave strategy allows for a key attribute: the ability to feed information and capabilities from each mission forward into subsequent Mars mission to be flown. Such new knowledge includes (1) scientific findings; (2) landing site characterizations; (3) improved atmospheric, surface, and subsurface models; (4) new flight-proven capabilities in both instrumentation and flight systems; and (5) lessons learned from previous mission development and operation activities.
This strategy was at work with the Mars Global Surveyor, Mars Odyssey, and Mars Express missions, which provided remote sensing data that identified a number of promising targets for detailed in situ surface exploration, including signs of aqueous sedimentary deposits—environments that on Earth are known to preserve evidence of past life—and surface and near-surface water ice deposits that may have melted during the recent past. Data from the Mars Global Surveyor orbiter was crucial to the selection of sites that Mars Exploration Rover (MER) missions are currently exploring.
With sequential Mars launch opportunities separated by as little as 26 months, feeding information forward into succeeding missions represents a considerable challenge. By the time information from one mission is collected and digested into knowledge, the next mission is typically already assembled and in final testing for launch. Hence, much of the knowledge acquired from a Mars mission may not strongly influence exploration activities until two or even three missions later, though program plans for the number of missions, schedule, and pace of exploration could change over time. However, some information, such as the location and physical properties of promising landing sites, can benefit future missions even after they have been launched. For instance, the Phoenix and Mars Science Laboratory missions are expected to finalize their landing sites after they are launched, in order to benefit from the remote sensing data to be provided by the Mars Reconnaissance Orbiter.
NASA’s approach to accommodating the rolling wave and the resulting information latency (the delay between when information is gathered and when it begins to influence mission design) is to alternate mission types in successive opportunities—orbiters, then landers, then orbiters—because critical information is often specific to the type of mission (e.g., orbiter versus lander). Thus, the agency has roughly 3 years (assuming the flight time to Mars and a 6-month science mission before scientific results are obtained) to integrate the results obtained by a lander, for example, into the next lander mission. The process has facilitated NASA’s ability to use the knowledge acquired from Mars missions for subsequent exploration.
Preliminary plans for the Mars program of the 2010-2020 decade suggest that international partners could play an increased role both in the scope and level of their involvement in Mars exploration activities, intensifying the rolling wave of missions on and data from Mars. The European Space Agency (ESA) is conducting advanced planning for the ExoMars mission in the 2009-2011 time frame. It will include an orbiter as well as a lander/rover with the Pasteur payload designed to detect signs of past or present life. ESA has also announced the Aurora program,6 which includes plans for Mars remote sensing, in situ exploration, a sample return mission, and eventually a robotic outpost and human exploration. Therefore, the specific mission set that NASA eventually flies will be affected by results from previous missions as well as evolving international plans. It may also be modified or augmented by NASA’s Moon-Mars exploration program, which could culminate in human missions to Mars (President’s Commission, 2004; NASA, 2004).
The rolling wave of Mars exploration has several implications for preventing the forward contamination of Mars. First, the number of planned Mars missions alone increases the potential for contamination. Second, the scope of activities conducted during surface missions and the number of potentially habitable environments to be explored is expected to increase dramatically, starting with the Phoenix mission to be launched in 2007. Missions such as the Mars Science Laboratory, ExoMars, Mars Sample Return, and the Mars Astrobiology Field Laboratory will all be specifically targeted to regions where scientists expect to confirm the past or present existence of water
(liquid or ice). The mission goals of ExoMars, Mars Sample Return, and the Mars Astrobiology Field Laboratory are also likely to include the search for extant or fossil martian life, and the makeup of instrument payloads on many future Mars missions is likely to focus on life detection. The sophistication and sensitivity of Mars lander instruments are evolving in response both to new technologies and information from previous missions, and instrument measurement sensitivities can be expected to improve with each subsequent mission.
Since publication of the 1992 NRC report on the forward contamination of Mars (NRC, 1992), 12 missions (orbiters and landers) have been sent to Mars, 6 of which have successfully completed their scientific objectives (see Chapter 1, Table 1.1). Knowledge of the planet continues to grow rapidly, and the need to revisit bioburden requirements on an ongoing basis is thus critical.7Chapter 4 describes the current scientific understanding of the Mars environment, particularly research on the potential for transient and long-lived liquid water—a key factor in considering the prospects for forward contamination.
REFERENCES
Beaty, D.W., S.M. Clifford, P. Gogineni, R. Grimm, C. Leuschen, G.R. Olhoeft, K. Raney, and A. Safaeinili. 2001. Report of the virtual instrument science definition team on: Facility Orbital Radar Sounder Experiment for MRO 2005 (FORSE). Mars Program Office White Paper. Available at <www.lpi.usra.edu/meetings/geomars2001/virtual.pdf>.
Blacic, J., D. Dreesen, T. Mockler, and G. Briggs. 2000. How to access and sample the deep subsurface of Mars. Workshop on Concepts and Approaches for Mars Exploration. Abstract No. 6065. Available at <www.lpi.usra.edu/meetings/robomars/pdf/6065.pdf>.
Clifford, S.M., R. Bianchi, M.C. De Sanctis, M. Duke, S. Kim, R. Mancinelli, D. Ming, Q. Passey, S. Smrekar, and D. Beaty. 2001. Science rationale and priorities for subsurface drilling in ’07. Mars Program Office White Paper. Available at <www.lpi.usra.edu/meetings/geomars2001/drilling.pdf>.
Hecht, M.H., and R.S. Saunders. 2003. CryoScout: A descent through the Mars polar cap. Third International Conference on Mars Polar Science and Exploration. Abstract 8078. Available at <www.lpi.usra.edu/meetings/polar2003/pdf/download/alpha_h-k.pdf>.
MEPAG (Mars Exploration Program Analysis Group). 2004. Scientific Goals, Objectives, Investigations, and Priorities: 2004, unpublished document. Available at <mepag.jpl.nasa.gov/reports/index.html>.
Miller, S.L., J.C. Essmiller, and D.W. Beaty. 2004. Mars deep drill—A mission concept for the next decade. AIAA Space 2004 Conference. Paper AIAA 2004-6048. American Institute of Aeronautics and Astronautics, Reston, Va.
MSPSG (Mars Science Program Synthesis Group). 2004. Mars Exploration Strategy 2009-2020, D.J. McCleese, ed. JPL 400-1131. Jet Propulsion Laboratory, Pasadena, Calif.
NASA (National Aeronautics and Space Administration). 2003. Solar System Exploration: The Solar System Exploration Roadmap for NASA’s Office of Space Science. JPL 400-1077-5/03. Jet Propulsion Laboratory, Pasadena, Calif.
NASA. 2004. The Vision for Space Exploration. NP-2004-01-2334-HQ. NASA, Washington, D.C.
NRC (National Research Council). 1992. Biological Contamination of Mars: Issues and Recommendations. National Academy Press, Washington, D.C.
President’s Commission on Implementation of the United States Space Exploration Strategy. 2004. A Journey to Inspire, Innovate, and Discover, June. Available at <www.whitehouse.gov/space/renewed_spirit.html>.
|
7 |
The bioburden is the level of microbial contamination (total number of microbes or microbial density) in or on an item of interest, in this case, a spacecraft. Additional planetary protection terminology is defined in Box 1.1. |




