C
System Requirements to Hit Moving Targets
The committee presents here an example of the recommended system engineering that focuses on solving the warfighter’s problems and thereby derives the characteristics of the component systems instead of starting with these characteristics as a “requirement.” An acute problem at present is that of hitting moving targets on Earth’s surface. Surveys show that moving targets normally constitute a high percentage of the targets in theater; tanks, armored personnel carriers, and patrol boats are examples. An important specific case is a high-value target such as a missile transporter-erector-launcher that is usually hidden when stationary and therefore vulnerable to attack only when on the move. The committee conducted an example analysis to accomplish the following:
-
Quantify requirements on various concepts for end-to-end systems to hit moving surface targets, considering a range of realistic environments and target behavior;
-
Explore trade-offs in how to balance the burden of performance among system elements; and
-
Examine how networking concepts can be employed to achieve system requirements.
The committee is aware that the Defense Advanced Research Projects Agency (DARPA) has established the Affordable Moving Surface Target Engagement program with similar objectives. The DARPA program has just begun; when results become available, they can be used as a more concrete basis for the
employment of networking concepts. Until then, this analysis provides a preliminary basis.
The specific problem to be solved is that of hitting a moving surface target among randomly distributed false contacts (real physical objects that can be confused with the intended target). The intended target deliberately maneuvers to avoid engagement.
The committee considered three weapon system concepts:
-
The weapon launch platform (e.g., a manned aircraft) carries a complex sensor that can acquire the target at long range and can usually distinguish target from false contact,
-
The weapon (e.g., a future cruise missile) carries a simple seeker that can acquire the target at short range and cannot distinguish target from false contact, and
-
The weapon (e.g., a Global Positioning System (GPS)-guided bomb with command data link) is delivered without reacquisition of the target.
Since moving targets are often numerous and individually of low value, inexpensive weapons are desirable. In the first concept, the weapon could be inexpensive, but the launch platform cost and the risk to pilots are also factors. To contain aircraft cost, the Joint Strike Fighter program office is conducting trade-off studies on how much targeting capability is needed on board versus how much can be obtained from off-board sources. The weapon for concept 3 can be less expensive than the weapon for concept 2. However, targeting system cost must increase to meet the demands of the simpler weapon. This is one of the key trade-offs to be examined.
C.1 ANALYSIS OF SYSTEM REQUIREMENTS
The mathematical model employed in this analysis is explained at the end of this appendix. The model builds on one used for a previous Naval Studies Board report1 that showed that the targeting system should provide a steady stream of reports to the weapon, as opposed to a single report. The targeting system must be able to (1) classify a target and (2) associate multiple reports with a single track. With these capabilities, a targeting system can then provide a steady stream of reports that enable a tracking filter to estimate speed and heading.
Central to the analysis are the models for target tracking and target reacquisition by the weapon or weapon launch platform. Figures C.1 and C.2 show the methodology for system requirements to kill moving targets. Figure C.1 depicts
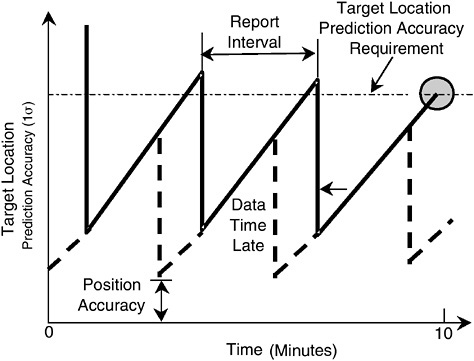
FIGURE C.1 Tracking the target.
the tracking model. The targeting system is characterized by three parameters: the position accuracy (error in measurement of target position at each update); report interval (time period between updates); and data time late (elapsed time from measurement to receipt of update by weapon or launch platform). Figure C.1 plots the target location prediction accuracy as a function of time. The committee assumes as a worst case that the weapon or launch platform arrives at the target just before an update. Figure C.2 illustrates the target reacquisition process. The assumption is that the weapon or launch platform (for weapon concepts 1 and 2, listed above) uses a search pattern that begins at the predicted target location and expands outward. Acquisition of the target requires that (a) the target is inside the sensor or seeker area of regard and (b) the search finds the intended target before a false contact is misclassified as the target. The probability of satisfying these two conditions depends critically on the target location prediction accuracy. In another report2 is a discussion on other search patterns
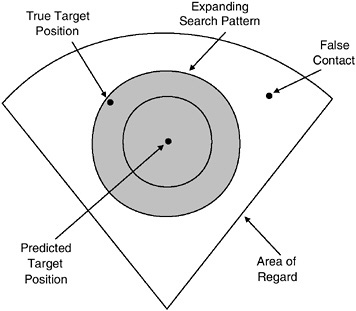
FIGURE C.2 Reacquiring the target.
and tactics one can employ to find a target in the midst of false contacts, depending on the kinds of targeting data available (e.g., the accuracy of information on location of false contacts) and mission objectives (e.g., limitations on collateral damage).
C.2 COMPLEX SENSOR FOR REACQUISITION
The most straightforward concept involving a complex sensor for target reacquisition is a manned aircraft. This is the only feasible method of hitting a moving target today. The Air Force’s F-15E may currently be the most capable U.S. platform for this mission. It carries an active radar with synthetic aperture (SAR) and ground moving-target indicator (GMTI) modes and can carry an electro-optical low-altitude navigation and targeting infrared for night (LANTIRN) pod. The Navy has no tactical aircraft with SAR capability. F-18 aircraft are about to undergo an upgrade to provide a SAR capability, but the SAR output will go only to a tactical reconnaissance pod, not the cockpit. A future concept in this category is an uninhabited combat air vehicle (UCAV) with high-resolution sensors and video data link to a human controller. Each of these concepts can employ the human eye and mind in the very difficult task of target recognition.
Figures C.3 and C.4 present system requirements for the conceptual weapon or launch platform that carries a complex sensor for target reacquisition. Figure
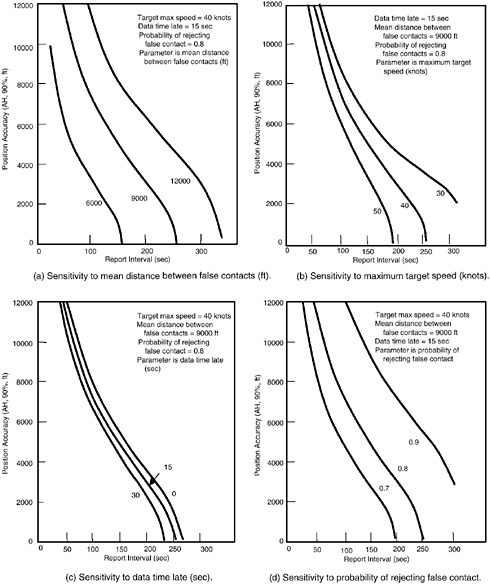
C.3 applies for a light density of false contacts; Figure C.4, for a dense background. Each figure contains four graphs, each with a different sensitivity analysis. Graph (a) shows the sensitivity to mean distance between false contacts; graph (b), the sensitivity to target maximum speed; graph (c), the sensitivity to data time late; and graph (d), the sensitivity to the probability of rejecting a false contact. Each graph plots the combination of position accuracy and report interval yielding a target location prediction error sufficiently small that the intended target is reacquired 90 percent of the time.
It is assumed that the complex sensor can acquire the target at a range on the order of 10 nautical miles. With this detection range, the sensor’s area of regard is so large that the probability of target reacquisition is determined entirely by the probability of finding the intended target before a false contact is misclassified as the target. Hence the driving parameters are the density of false contacts and the complex sensor’s target recognition capability. Target recognition capability is characterized by two numbers. The question is, What is the probability that the sensor (or human-sensor combination) correctly recognizes an object under two situations: (1) given that the sensor is looking at the intended target, and (2) given that the sensor is looking at a false contact? For operational situations where the need to hit the target dominates the risk of collateral damage, the probability for the first situation must be high; the probability for the second situation can vary.
A key conclusion drawn from Figures C.3 and C.4 is that system requirements are driven by the environment. The density of false contacts is primary, and the target motion characteristics also have an influence. A major trade-off exists between (1) the targeting system’s accuracy and frequency of reporting and (2) the weapon launch platform’s capability to distinguish the intended target from a false contact. This is especially true in a very dense environment.
For later comparison, consider the requirements to hit a 40 knot target among false contacts 3,000 ft apart. If the launch platform with complex sensor is capable of rejecting false contacts 80 percent of the time, it requires a report every 75 s if accurate to 500 ft and less than 5 s late.
C.3 SIMPLE SEEKER FOR REACQUISITION
A possible concept involving a simple seeker for target reacquisition is a future cruise missile with targeting data link and multiple submunition packages so that the cost of a cruise missile is offset by multiple target kills. A second concept is a joint standoff weapon (JSOW) with targeting link and simple seeker. The weapon could have a video link to launch platform to help with target acquisition.
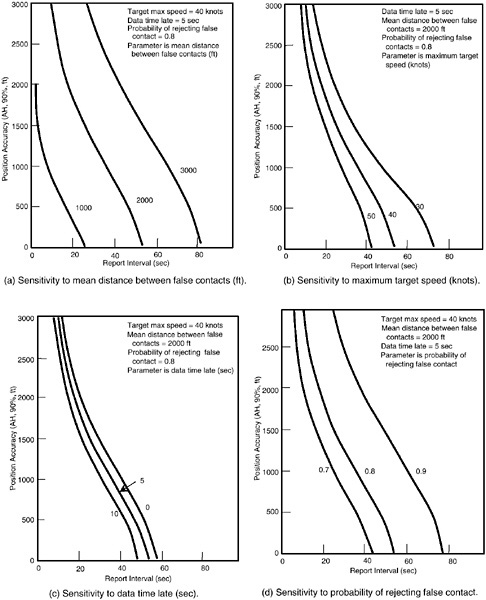
It is assumed that the simple seeker can detect the intended target at a range of 1.5 nautical miles and nominally has no capability to distinguish target from false contact. Presumably, it does not have the same high resolution as the
complex sensor. Figures C.5 and C.6 present system requirements for a weapon carrying a simple seeker. The format is the same as described above for Figures C.3 and C.4.
Figure C.4 shows that, with the simple seeker’s short detection range, the area coverage requirement does come into play. However, for the most part, the density of false contacts continues to be the driving parameter. Graphs (c) and (d) in Figures C.5 and C.6 show that a little time delay does not hurt and a little target recognition capability does not help. (The probability of rejecting a false contact must be on the order of 0.6 or 0.7 to relax targeting requirements significantly.) Again, system requirements are driven by the environment.
For later comparison, again consider the requirements to hit a 40 knot target among false contacts 3,000 ft apart. The weapon with simple seeker requires a report every 30 s if accurate to 500 ft and less than 2.5 s late.
C.4 NO REACQUISITION
A weapon that can be command guided into a target without benefit of a seeker is an appealing concept for cost reasons. Air-launched examples might include the joint direct attack munition (JDAM) with its unitary warhead, or a JSOW with its submunitions, each modified to include a data link. Ship-launched examples might include the extended-range guided missile (ERGM), also modified to include a link. What are the targeting requirements?
Figure C.7 shows that they are severe, especially for a precision weapon that has a small lethal radius to minimize collateral damage. The weapon needs a fresh report, accurate to tens of feet, every few seconds. Every second of delay in delivering the data hurts.
Once again for later comparison consider the requirements to hit a 40 knot target. For a weapon that does not reacquire the target, the density of false contacts is not a factor. A weapon with a 200 ft kill radius requires a report every 5 s if accurate to 70 ft and less than 1 s late.
C.5 TARGETING SYSTEM DESIGN CONSIDERATIONS
The technology currently most capable of detecting and tracking surface targets is active radar with synthetic aperture and ground-moving target-indicator modes. As mentioned, the F-15E has these capabilities for targeting its own weapons. Among wide area surveillance platforms, the Air Force’s Joint Surveillance and Target Attack Radar System (JSTARS) aircraft employs these techniques today, and the high-altitude, long-endurance unmanned air vehicle Global Hawk is planned to incorporate them in the future. DARPA’s Discoverer II Program has the objective of fielding two satellites to demonstrate the feasibility of an affordable constellation of satellites with SAR/GMTI capability. Difficulty in classifying targets sometimes requires use of additional data such as electro-
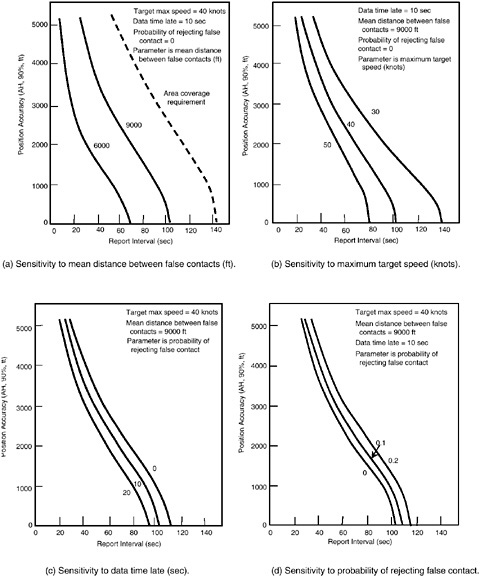
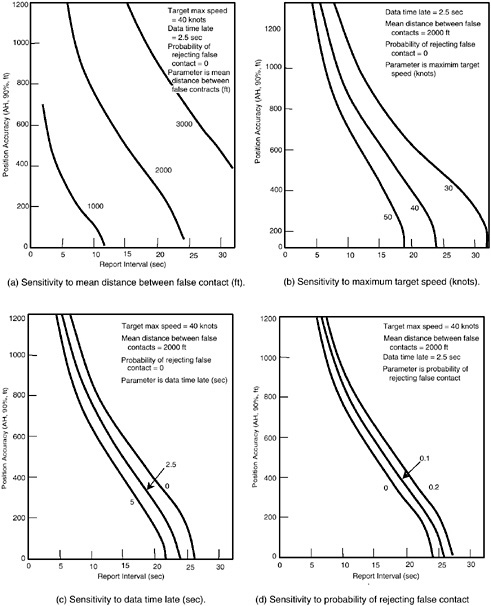
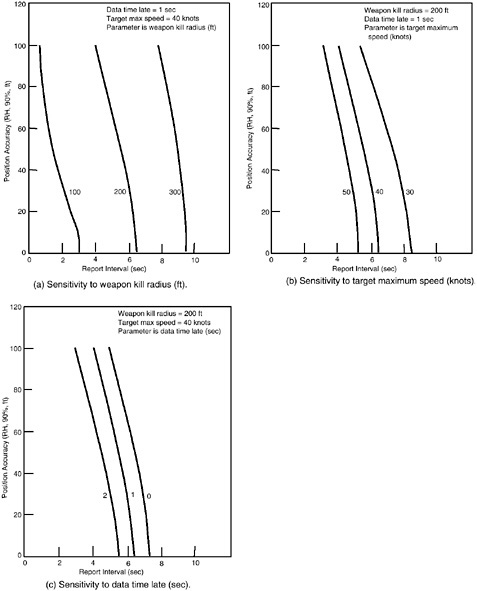
FIGURE C.7 System requirements to hit moving targets; no reacquisition.
optical imagery. SAR/GMTI sensors, especially on airborne platforms, can be subject to terrain masking in rougher terrain or urban areas. Frequency of reporting must be traded off with the size of the area surveilled; one JSTARS aircraft can provide reports every 30 s or so over thousands of square miles. Target location measurements from the aircraft are more accurate in the range dimension
than the azimuth; one JSTARS aircraft at long range can easily meet an accuracy of 500 ft (90 percent) in azimuth.
The committee notes in passing that the Navy has no SAR/GMTI capabilities and no formal plans to develop them. However, the E-2 Advanced Development Office has an interest in a program for a new radar that would incorporate SAR/ GMTI capability in that aircraft.
C.6 EXPLORATION OF TRADE-OFFS
Given the capabilities of the JSTARS aircraft, and assuming that the capabilities of other future airborne and spaceborne systems will be similar, one can compare the three weapon concepts and draw some conclusions about them.
First, the requirements to target the weapon with simple seeker are not onerous compared with those to target a launch platform with complex sensor. In the specific case cited, 500 ft position accuracy was chosen as a baseline. Then the complex seeker reacquires the target if given a report every 75 s and no more than 5 s late. The simple seeker reacquires the target if given a report every 30 s and no more than 2.5 s late. Targeting requirements should not be difficult to meet for either of the weapon concepts that reacquire the target when distance between false contacts averages more than 3,000 ft. Note that in some important situations, e.g., a military convoy containing a high-value target, false contacts will be much closer than this (e.g., 150 ft). These situations require either much more accurate targeting or an effective automatic target recognition capability on weapon or launch platform.
The trade-off between concepts 1 and 2 then devolves to comparing the advantages and disadvantages of directing a manned launch platform with an inexpensive weapon into the target area versus having a launch platform standoff and delivering a somewhat more expensive weapon. There may be a place for both concepts, depending on the operational situation, driven by either the air defense threat in the target area or the density of false contacts. One basis for such a belief is the Navy and Air Force commitment to both JDAM and JSOW, which, against fixed targets, offer the commander a choice between direct attack and standoff from point defenses.
For the concept of a weapon that does not reacquire the target the targeting requirements depend critically on the weapon’s kill radius. A weapon with 200 ft kill radius requires a report every 5 s if accurate to 70 ft and less than 1 s late. These are difficult targeting requirements to achieve.
C.7 EMPLOYMENT OF NETWORKING CONCEPTS
For the two weapon concepts described above that reacquire the target, system requirements are driven by the environment, principally the density of false contacts. How can one design a system for all likely environments? Design for
very dense environments (say, false contacts less than 1,500 ft apart) would be overdesign by large margins for less stressing cases and appears to be prohibitively expensive given the nature of the targeting platforms and sensors. The answer may be to design an end-to-end system that accomplishes the following:
-
Assists a strike commander in making quick decisions on which targets should be the highest priority to hit;
-
Incorporates an online performance prediction to enable the commander to judge the likelihood of success in prosecuting an attack against a specific target at a specific time, given the current deployment of targeting system and weapon system assets; and
-
Enables the commander to move and focus targeting system and weapon system assets in near-real-time to accomplish the high-priority goals.
In other words, the answer may be to provide the commander with the tools to control assets flexibly in order to tighten the targeting-system-to-weapon-system loop when necessary.
For the concept of the weapon that does not reacquire the target, the committee found that targeting requirements were severe. Can networking enable the requirements to be met? The committee believes there are several networking concepts that may help, at least for weapons with larger lethal radii (e.g., 200 ft). Fusion of data from multiple sensors at different geometries can greatly improve the accuracy of the target position measurement, taking advantage of the radars’ precise range estimates. The targeting data can be put into a common navigational coordinate system by communicating among all targeting and weapon system platforms to control the specific GPS satellites they all track.
Will an effective system for hitting moving ground targets be like the cooperative engagement capability (CEC)? Detailed studies and experiments are necessary to answer this question adequately, but one can make some observations. Figure C.4 compares CEC and a notional future architecture for a system to hit moving ground targets. There are some major differences and some strong similarities. The differences come about for two reasons. First, CEC links ships that have sensing, processing, and weapon capabilities, whereas the system to hit moving ground targets will likely be composed of different kinds of platforms for sensing, processing, and weapon delivery. Second, ground targets and their environment differ from air targets and their environment. The similarities come about because some of the techniques CEC uses to create tracks from measurement data provided by distributed sensors appear applicable. Prominent CEC attributes include (1) one communication system linking all participants, (2) decentralized architecture with all participants receiving all measurements and processing them all the same way to achieve the same tactical picture, (3) composite tracking (i.e., development of a target track from measurements of distributed sensors), (4) gridlock registration (i.e., comparing pictures among
participants to correct for relative navigation errors and misalignments), (5) all data of one kind, (6) high communication data rates, and (7) in the future, accuracy refinement.
C.7.1 One Communication System Links All Participants
Will a system that is effective for hitting moving ground targets be like CEC in utilizing only one communication system to link participants? Answering this question requires asking who is a participant. In CEC the answer is clear; CEC links ships that have the needed sensor, processing, and weapon capabilities. One communication link, the Data Distribution System, suffices. A future system to hit moving ground targets will probably use one link for communicating sensor measurement data to a processing facility and another for communicating targeting data from processing facility to weapons. SAR/GMTI sensor platforms will likely use a common data link (CDL) to transmit measurements to a processing facility. For most of the cases, the Joint Tactical Information Distribution System (with its 12-s refresh rate) appears to be adequate for line-of-sight communication from processing facility to the weapon launch platform, which may use other links to the weapon to update it in flight. Over-the-horizon communication from processing facility to aircraft or cruise missiles will require satellite communications, e.g., the ultrahigh-frequency satellite communications link planned for Tomahawk Block IV, which can support report intervals at least as short as 9 s. In summary, the future system to hit moving targets will likely utilize more than one communication link.
C.7.2 Decentralized Architecture with All Participants Receiving All Measurements and Processing Them All the Same Way to Achieve the Same Tactical Picture
One of the principal advantages of a decentralized architecture is robustness; single point failures are eliminated. Decentralization is more natural when, as in CEC, all participants are similar. Future platforms to detect moving ground targets are likely to be quite diverse: large, highly capable manned aircraft; large, high-endurance unmanned aerial vehicles (UAVs); smaller medium-endurance UAVs; and perhaps a constellation of (low-cost) satellites. Expecting the same performance of each appears unreasonable. Furthermore, the ground target is more difficult to identify than the air threat, whose motion alone may betray its identity; therefore, human observation, interpretation, and decision making will be key. For these reasons, collection and processing of data are likely to occur in manned facilities, ground-based or airborne. That is, manned facilities will create and identify the tracks. Therefore it will be unnecessary for an unmanned sensor to receive measurement data from other sensors. Today’s JSTARS operations include processing on the aircraft and in multiple, distributed, decentralized,
ground-processing stations focused on specific geographic subareas. Geographically focused processing units may continue to be useful, wherever they are located. Each of these geographically focused units should be capable of receiving all measurement data from all sensors for the robustness that redundancy provides. However, it will typically not be processing data to achieve the same tactical picture as other units, but rather the tactical picture for one geographic locale. In summary, the future system to hit moving targets will probably not have a sensor net like CEC. It may have decentralized processing facilities that are capable of receiving all measurement data and typically process all available data for a specific locale.
C.7.3 Composite Tracking
A system designed for tracking moving ground targets will probably benefit considerably from composite tracking if several geographically dispersed SAR/ GMTI platforms are covering the same area. Composite tracking will help with identification maintenance, terrain obscuration, and minimum Doppler velocity dropouts. It comes naturally when measurement data from multiple platforms are processed at one facility.
C.7.4 Gridlock Registration
Use of GPS could also solve the relative navigation issue inherent in fusing data from various platforms, but CEC’s gridlock registration methodology reduces dependence on GPS and simultaneously solves misalignment problems.
C.7.5 All Data of One Kind
The future system for hitting moving ground targets will not sense and process just one kind of data. In addition to GMTI measurement data, SAR images and other attribute data will be sensed and processed, and interpretation of these data will be a key function.
C.7.6 High Communication Data Rates
As discussed above, the future system will use several data links, some of which need not have the same capability as the CEC’s Data Distribution System.
C.7.7 Accuracy Refinement
As discussed above, accuracy refinement would appear to be a requirement if the weapon or its launch platform does not reacquire the target. Otherwise the
feature may help with tracking in dense traffic. Additional studies are needed to determine this.
C.8 THE AUTOMATIC TARGET RECOGNITION CHALLENGES
Targeting requirements can be met rather easily provided that the weapon or launch platform has some capability to recognize the target (and density of false contacts is not too great). Target recognition is not an easy task, but imperfect capabilities can suffice. Some degree of automatic target recognition is key.
For a launch platform with a complex sensor, the committee determined targeting requirements as a function of the probability that the combination of sensor and human observer will reject false contacts, i.e., distinguish false contacts from the intended target. Although the human eye and mind are unexcelled at such a task, it is likely that the aircraft will have only a single seat, that the pilot’s attentions will be divided, and that the pilot would not be, under the best of circumstances, as expert as an operator on a surveillance aircraft. The complex sensor and its processing system should give the pilot every available aid to find the target and reject false contacts.
For a weapon with a simple seeker, the key capability is the ability to recognize the target against the earth (or water, or urban street, and so on) background. The committee found that a little capability to distinguish false contact from intended target is essentially of no help. It is possible that the weapon could have a video link to a manned platform, which could enable a human eye and mind, again, to help find the target. In any case, it is imperative that the seeker have an autonomous capability.
C.9 ANALYSIS SUMMARY
For weapon concepts in which targeting system data are used to cue a sensor that reacquires the target, targeting requirements are often driven by the density of false contacts, objects that can be confused with the intended target. For environments in which false contacts are separated by 3,000 ft or more on the average, targeting requirements can be relatively easily met (e.g., with one JSTARS aircraft), even if reacquisition is accomplished by a weapon with short-range seeker and no capability to distinguish false contacts from intended target. Denser false contact environments require either a launch aircraft with complex sensor and good target recognition capability or more frequent, more accurate, and more timely targeting reports.
How can the Department of Defense design a system for all likely environments? The answer may be to design an end-to-end system that enables the commander to predict performance on line and control assets flexibly in near real time in order to tighten the sensor-to-shooter loop when necessary.
For the concept of the weapon that does not reacquire the target, the commit-
tee found that targeting requirements were severe but that several networking concepts might enable them to be met, at least for weapons with larger lethal radii (e.g., 200 ft). Fusion of data from multiple sensors at different geometries can greatly improve the accuracy of the target position measurement, taking advantage of the radars’ precise range estimates. The targeting data can be put into a common navigational coordinate system by communicating among all targeting and weapon system platforms to control the specific GPS satellites they all track.
C.10 TARGET TRACKING MODEL
The committee presents here the model that was used to derive the results displayed in Figures C.1 through C.7. It applies to targeting data and target motion in the case where an on-station observer provides a sequence of position reports.
The targeting system must be able to classify a target and associate multiple reports with a single track. In general, it must be able to do this in a multitarget environment. With these capabilities, a targeting system can provide a steady stream of reports that enable a tracking filter to estimate speed and heading.
If a target is aware or suspects it is being tracked and is aware of the technical characteristics of the tracking system (update rate and position accuracy), it can maneuver in order to maximize the tracking system’s error. In doing so, it must trade off its ability to advance rapidly. This analysis assumes that the target velocity consists of a steady component and maneuver component. The steady component is a fixed-speed and uniformly distributed heading held constant throughout the search. The maneuver velocity is a random process with root mean square value set so that the target neither loses ground on its intended track nor moves faster than its maximum speed (most of the time). The target’s frequency of maneuvering is then set to maximize the tracking system’s error.
In what follows, attention is confined initially to a single axis of motion, and then, with appropriate choice of parameters, the results are extended to two dimensions.
Define
x = target position,
S = steady component of velocity, and
v = maneuver component of velocity.
Assume equations of motion as follows:

where
a = white noise acceleration, and
ω = maneuver frequency.
Now
where δ(τ) is the Kronecker delta function, and
where ![]() is the steady-state variance of the maneuver velocity.
is the steady-state variance of the maneuver velocity.
If a state vector x is defined such that
and covariance matrix P such that
then P satisfies the equation
P = AP + PAT + GBGT
between observations, where

and the equation
P+ = P− − K M P−
at observations where
The differential equation for P can be solved and the step equations simplified. Define
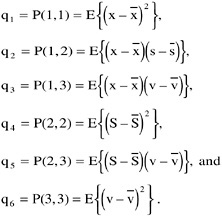
We initialize the problem as follows:
This choice of parameters allows the target neither to lose ground on its intended track nor to attempt to move faster than its maximum speed (most of the time).
We then apply the following recursive algorithm: