
6
Power and Related Technologies
Power generation aboard many classes of UAVs will be similar to power generation for conventional aircraft. The power system is driven by the main propulsion engines (so called “shared-shaft” power) or, in some cases, by an APU, which is a small gas turbine that drives nonpropulsion electric, hydraulic, or pneumatic loads on the ground or in flight. The situation for MAVs or HALE UAVs operating at extremely high altitudes may be different, however. For these vehicles, the propulsion system might not provide external power or may require electric power, or the required storage life of the power system might be longer than normal.
For typical aircraft, the electric or hydraulic power requirement is 100 to 1,000 times less than the power requirement for propulsion. Thus, excess propulsion power can easily be specified for these purposes at the design stage. However, the power requirements may not be realizable in practice because of other design constraints. Therefore, it would be wise to investigate alternatives to shared-shaft or APU power generation.
Unlike many other UAV subsystems, the power system interfaces with both the platform and the payloads. Depending on the mission, the payload will require electrical power from the UAV. This power demand may be a few tens or hundreds of watts for sensors or communications, or it may be tens of kilowatts or more for radar, jamming devices, or weapons. The committee did not attempt to explore the technology requirements to support this wide range of requirements but focused on the electrical power generation necessary for nominal housekeeping (or possibly, propulsion) power for the UAV platform.
In addition to electrical power, this chapter briefly discusses two related technologies—the thermal management system and actuators. Thermal
management is often integrated into the power system because much of the thermal load is often generated by electrical devices. The operation of hydraulic system components and other actuators is also closely related to electrical system design requirements for peak versus average power.
BACKGROUND
Much of the technology used in the design of conventional aircraft is directly applicable to UAVs. In fact, two Air Force programs, More Electric Aircraft and More Electric Engine, have advanced the state of the art for onboard power systems. This section reviews present technologies and identifies technology needs that could be addressed as part of a comprehensive UAV research program.
Electric Power System
The choice of an electric power system is dictated in large part by the mission requirements, specifically the amount of power required and the time over which the power is to be delivered (i.e., the total energy required). Although systems are usually described in terms of average power, the peak power can also determine the size of the overall system. (Peak power can often be accommodated through a power conditioning system.)
Figure 6-1 provides an overview of several options for a prime power source for a range of average power levels and flight durations. For modest loads and short flight times (minutes), batteries can provide hundreds of watts of power or more. Batteries are attractive because of their relatively low cost and modularity, especially at small sizes, but they have low power and energy densities compared to other alternatives. Fuel cells can provide power from hundreds of watts to hundreds of kilowatts. Because fuel cells have excellent efficiency, they may be an option for very long-endurance missions. However, fuel cells have not yet been developed for use in aircraft, and current fuel cell systems are relatively complex and require inconvenient fuels (e.g., hydrogen). At higher power levels, kilowatts to megawatts, conventional dynamic conversion systems, such as turbines or diesel generators, come into play. For extremely long operating times and modest loads, solar-battery systems might be applicable. Each of these alternatives is discussed below.
The prime power source is the first of several subsystems necessary to provide electrical power. The overall power system shown in Figure 6-2 reflects the many choices that are available. The selection of a prime power source will be determined by mission requirements and platform constraints. After the prime power source has been selected, the subsystems related to power conversion, power storage, and power management must be defined. The conversion process may be as simple as a battery or as complex as a gas turbine generator. Storage subsystems may be necessary for start-up, peak power, and transients. The power
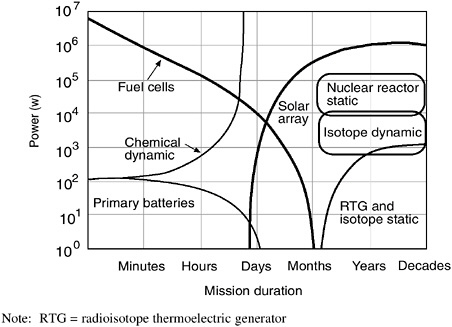
FIGURE 6-1 Options for a prime power source for a range of average power levels and flight durations. Courtesy of A.K. Hyder.
management and distribution subsystem links the energy generation source to the energy storage elements and to the aircraft electrical loads. This management function involves regulation, distribution and control, and fault detection and isolation, as well as point-of-load power conditioning.
The technologies shown in Figure 6-2 have been used in the space program, and many advances in these technologies can be traced to the need for lightweight, low-volume, reliable electrical power aboard spacecraft. Some of the
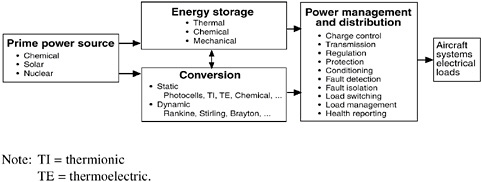
FIGURE 6-2 Schematic representation of overall aircraft power system.
technologies have improved substantially, while others have changed little during the past decade or so. Table 6-1 shows the evolution of several key parameters for components and systems important to space operations, some of which are also applicable to UAVs.
As shown in Table 6-1, a key consideration in the selection of a power source is specific power (power per unit mass). The specific power of space-based technologies is compared with a broader selection of power sources in Figure 6-3. For automobile engines, large aircraft engines, and other applications for which power system mass is not a critical constraint, very high specific power can be realized. In the case of HALE UAVs or MAVs, the choices are considerably more limited.
Related Systems
Thermal Management
Thermal management remains a serious design function onboard all aircraft, including UAVs. Current avionics cooling systems provide a cooling capacity of about 50 W/cm2 of avionics-system surface area. In the constrained volume of a UAV, and with a possible increase in avionics density for autonomous operation, cooling designs with perhaps five times that capacity may be needed.
Thermal management onboard current aircraft often involves a circulating liquid cooling system that collects heat from distributed loads and then rejects it to the fuel or to a liquid-air heat exchanger, cooled by ram (engine inlet) air. Some UAVs will certainly employ the same techniques. To reduce cost and complexity, however, advanced UAVs may employ a more integrated design that involves the vehicle structure, which could be used as a heat sink. Materials with poor thermal conductivity (e.g., composites) may be set aside in some areas in favor of materials with high thermal conductivity (e.g., aluminum) even though there may be a mass penalty from a structural perspective. Heat pipes might also be used, and endothermic fuels could be used to increase fuel heat sink capability. Batteries with less than optimal energy density could be selected if their chemical activity is endothermic. Thermal management is a systemwide issue.
Actuators
Traditional hydraulic systems will not be used in most future UAVs because these systems represent a substantial vehicle weight penalty, reduce available volume for payloads, and increase vehicle complexity and production costs. Aircraft electromagnetic actuators (EMAs) could be the best alternative to hydraulic actuation for vehicle control. Although EMAs have increased in power and can reduce overall system weight, complexity, and cost, current EMA technology may not be able to meet all UAV needs, especially for MAVs. Higher torque,
TABLE 6-1 Key Parameters for Space Power Components and Systems Applicable to UAVs
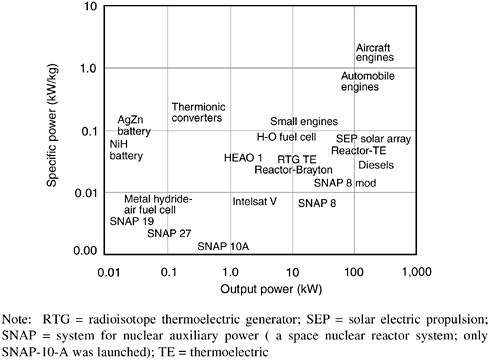
FIGURE 6-3 Comparisons of specific power of space-based technologies with a broad range of power outputs.
lower mass, and lower power EMAs will be required. Hybrid electric-hydraulic actuators may be a near-term solution for UAVs that require very high power. Current programs at DARPA, including the Compact Hybrid Actuation Program, are exploring the development of EMAs and devices using smart-materials transduction elements, including piezoelectrics, electrostrictives, magnetostrictives, and shape memory alloys.
TECHNOLOGY NEEDS
For conventional UAV missions, electric power and related systems will not be critical or enabling for the next decade, although advances in the state of the art would certainly improve UAV performance. For MAVs and HALE UAVs, many of which are electrically powered, power generation is a pacing technology.
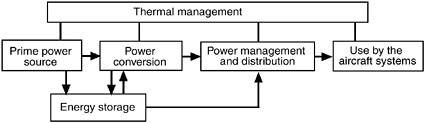
FIGURE 6-4 Electrical power system and primary subsystems.
Electrical Power System
The design of the electrical power system and its primary subsystems (see Figure 6-4) will involve trade-offs among several interacting technologies that can be used for power generation (prime power, energy storage, and power conversion [see Table 6-2]).
Prime Power Sources
Improvements in current integrated power-propulsion (shared-shaft) systems should lead to generators and power-conditioning equipment with higher efficiency, lower weight, and lower cost. APUs are an attractive alternative to shared-shaft systems in some cases, but many UAVs would require much smaller APUs than are currently being manufactured. The challenge will be to preserve performance, weight, and cost advantages in small-scale designs. Relevant technologies will include low Reynolds number turbomachinery, air bearings, and small heat exchangers.
MEMS are micron-scale to millimeter-scale machinery often constructed with semiconductor fabrication techniques. Initial development was concentrated on microsensors and actuators, but current research is being done on MEMS heat engines and electric generators, which could serve as very small APUs (Epstein and Senturia, 1997). Millimeter-diameter to centimeter-diameter gas turbine generators are under development, and initial design goals are 10 to 20 watts of power. Later developments may produce as much as 100 watts in a button-sized unit operating at sea level. Running on hydrocarbon fuels, these devices would have 10 to 30 times the power and energy density of state-of-the-art batteries. If they are produced in large numbers, the cost per unit power might be competitive with large power generators and batteries. In UAVs, MEMS power systems could be part of low-weight, modular, distributed, highly redundant power generators. From a systems perspective, MEMS would greatly reduce the need for a vehiclewide power-management and distribution subsystem.
TABLE 6-2 Trade-offs among Interacting Technologies for Power Generation
Air-driven generators, like MEMS generators, could also be distributed around a UAV to provide spot power, but issues of aerodynamic integration, signature, and overall system benefit will first have to be resolved.
If fuel cells can operate with propulsion fuels—or propulsion systems can operate on hydrogen—power and propulsion systems could use the same fuel storage and distribution system. Research will be necessary for either approach, either to develop fuel cell technology compatible with propulsion fuels or to develop ways of efficiently storing, distributing, and releasing hydrogen at room temperature. Research related to hydrogen storage and distribution could also be used in a number of applications other than UAVs.
Although beamed energy could conceivably be used to power a UAV in a few scenarios, a wide range of issues must be resolved before this could be considered a realistic technology. Important unresolved issues include safety, operations, pointing, tracking, high-power beam handling, and target signatures. Beamed energy is, at best, a long-term research prospect.
Energy Storage
The availability of secondary batteries with improved energy densities and long shelf lives in the charged state would be useful for weight-constrained UAVs. Batteries with very high specific power and, in the case of primary batteries, a long shelf life could be used for limited-life MAVs by providing propulsion power, as well as housekeeping power. Battery research is being actively pursued by DOD.
Fuel cell research is also under way in support of many non-UAV applications, including the space program. The UAV design community would benefit from general advances in fuel-cell technology because the requirements for UAV applications are not unique. The USAF should closely monitor the development of new fuel cell designs that could lead to significantly higher specific energy (e.g., titanium plates in H2–O2 regenerative fuel cells).
Dynamic conversion processes, such as turbines or diesel generators, are clearly options for UAVs at higher power levels. These could be conventionally sized as central power units or distributed using MEMS technology.
Power Management and Distribution
UAV requirements for power management are similar to those for conventional aircraft. However, UAV systems, like spacecraft systems, must demonstrate a high degree of autonomy and, hence, robustness. Also, power conditioning is a particular concern for MAVs for which the lack of very compact, lightweight power conditioners is a major design constraint.
The mass of the power distribution subsystem could be greatly reduced through a distributed generation system of microgenerators, but only if their
efficiency is comparable to larger power generation systems. The power management function will require sophisticated control systems that will not be unique to UAVs and can be expected to be available in the normal evolution of control technology.
Related Systems
Thermal Management Systems
Denser packaging of avionics and propulsion systems will place a premium on thermal management designs. Increasing the use of composites in UAV structures could make it significantly more difficult to transfer heat from the interior of the aircraft. Also, active cooling will probably be avoided whenever possible to minimize system complexity, mass, and power requirements. Research into microchannel plates and compliant diamond-film heat spreaders could lead to more efficient heat exchangers for cooling densely packed electronics.
One way to attack the thermal management issue is to reduce the amount of heat generated. Although this may not be possible with turbines or airfoil surfaces in high-speed vehicles, it will be possible with avionics packages by developing more efficient, lower power electronics. Extremely low-power electronics and high-efficiency electrical subsystems would also reduce overall power requirements.
Research into endothermic battery couples, which cool during operation, is another possible approach for using the design of the electrical system to enhance thermal management. Similarly, UAVs could also benefit from the development of fuels with increased heat capacities (a follow-on to JP-8+100),1which could be used as heat sinks.
Actuators
Hydraulic lines are likely to be replaced with EMAs. Research will be necessary to develop EMAs with higher torque, higher efficiency, and lower weight, especially for MAVs.
OPPORTUNITIES FOR FUNDAMENTAL RESEARCH
Finding. No fundamental research issues related to the generation of power aboard UAVs would have to be resolved to enable generation-after-next vehicles.
Although continued development of many prime power technologies would enhance UAV capabilities, most of these technologies will evolve with little or no intervention from the UAV community. Possible exceptions to this are specialized technologies for producing solar-powered HALE UAVs and air-driven or combustion-driven microgenerators that would distribute the power generation function throughout a UAV. The latter technology could be particularly useful in the design of MAVs.











