
5
From the Compartment to the Fluid
The mathematical modeling presented in Chapters 3 and 4 was based mainly on compartment models, models that lead to differential equations with unknown rate parameters. Another approach, taken by two other workshop presenters, is to investigate the fluid dynamics of the underlying biological system and use those principles to enhance our biological understanding.
George Oster, of the University of California at Berkeley, started his talk by showing a computer-generated movie representative of myxobacteria movement and then presenting a mathematical model that describes the collective behavior during the “ripple phase” of development. The ripple phase (see Figure 5-1) is characterized by a unique pattern of waves that appear to pass through one another; moreover, they can occur without any net movement of bacteria (see Igoshin et al., 2001).
Knowing that myxobacteria move with a combination of two motility mechanisms, labeled A and S, which are controlled by different physiology, Oster sought to combine mathematical models of these mechanisms with a model of the bacterial communication system into a dynamic model that could produce the ripple phase. The resulting model succeeded in emulating and explaining important characteristics of the motion of myxobacteria, such as how the bacteria in crests move with the wave while the bacteria in troughs move against the wave. When waves collide, some bacteria continue moving forward and others reverse, in accordance with experimental observations. The model also captures the ability of ripple waves to move through one another and to propagate without any net transfer of mass.
In another application of fluid dynamics, Charles Peskin, of New York University, described a mathematical model for the heart that considers the muscle tissue to be a time-dependent elastic material, which can be modeled using fluid dynamics. The geometry of his model builds on work in the 1950s by Carolyn Thomas, which described the fiber architecture of the heart as a system of spiraling muscle fibers (see Figure 5-2).
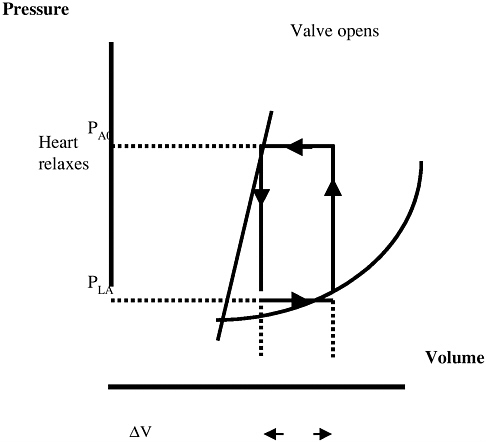
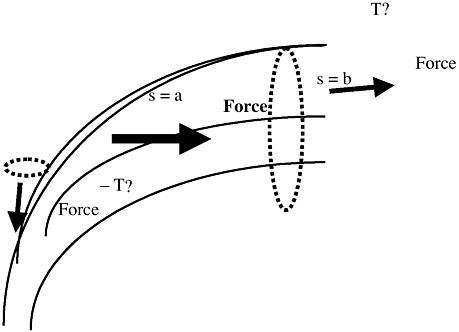
By considering the heart as a composite material of fiber and fluid, Peskin developed equations of a viscous, incompressible fluid to describe the force applied by the fibers to the fluid. Figure 5-3 illustrates the relationship between pressure and volume and how it changes as the valves open and close, while Figure 5-4 shows the force vectors, illustrating the forces on the muscle fiber of the heart.
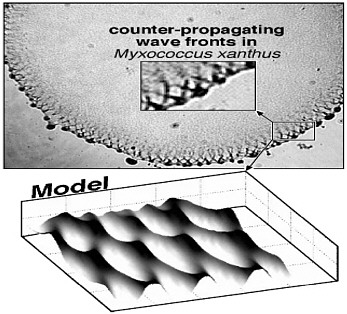
FIGURE 5-1 Micrograph and model output showing patterns in the ripple phase. Figure courtesy of George Oster.
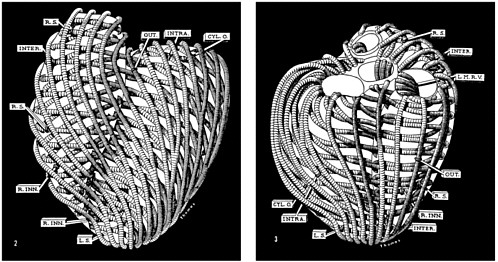
FIGURE 5-2 Muscular architecture of hog ventricle. Left, anterior view; right, posterior view. Reprinted with permission from Carolyn Eyster Thomas, Muscular architecture of the ventricles of hog and dog hearts, American Journal of Anatomy, Vol. 101 (1957), 17-57.
Using the following definitions,
q,r,s = material parameters (s varies along the fiber)
t = time
x = x(q,r,s,t), position
τ = τ(q,r,s,t), force
T = T(q,r,s,t), stress
Peskin derived the following differential equations:
-
The fluid equation, in Cartesian coordinates, which describes the force of the fibers on the fluid:
-

-
The fiber equations, which describe the stress on the fibers:
-
-
The interaction equation, which ties them together:
-

Note that the equations are expressed using the Dirac delta function, an alternative to computing a Jacobean. Use of the delta functions results in an algorithm that is numerically more stable than one that relies on a Jacobean.
Peskin also described a numerical method for solving the equations, using a second-order immersed boundary method derived by M.-C. Lai, which is based on an extension of the Runge-Kutta method. This method can also be used in traditional fluid mechanics problems.
The model output (example frames shown in Plates 1 and 2) compares admirably with MRI scans. Perhaps most impressive, the model captures the swirling movement of blood within the ventricles, a phenomenon of physiological importance that had not emerged in simpler models. This swirling explains why less force is required to exit the chamber than would otherwise be predicted, and it also eliminates leakage in valves from back pressure. However, some improvements are still needed in the model, including refining the representation of the up-down valve motion, getting a larger valve opening, and decreasing the movement of the base of the heart.
It is interesting to note that the Peskin work reflects two of the main themes common to other talks at the workshop. First, the evolution of his heart model over the years has been guided by a clear
understanding of what physiological features must be captured and what mathematical methods might be suitable to do so, rather than by, say, simply increasing model resolution. For instance, his previous model, although doing an adequate job of reproducing some heart actions, displayed an irregular pattern of blood flow and leakage in the valves that was significantly different from the pattern in a functioning heart. His current version has become more complex in a way that can capture this important phenomenology. Second, the Peskin model illustrates how a mathematical representation can suggest insights (subject to experimental validation) that would not be apparent from current experimental data. The Peskin heart model is an approximate surrogate for a beating heart, a surrogate that can be manipulated and inspected in ways that a living heart cannot.





